Lecture 3 Theoretical Foundations of RTOS
|
|
|
- Magdalene Moore
- 9 years ago
- Views:
Transcription
1 CENG 383 Real-Time Systems Lecture 3 Theoretical Foundations of RTOS Asst. Prof. Tolga Ayav, Ph.D. Department of Computer Engineering

2 Task States Executing Ready Suspended (or blocked) Dormant (or sleeping)
 Dormant")
3 Task State Diagram

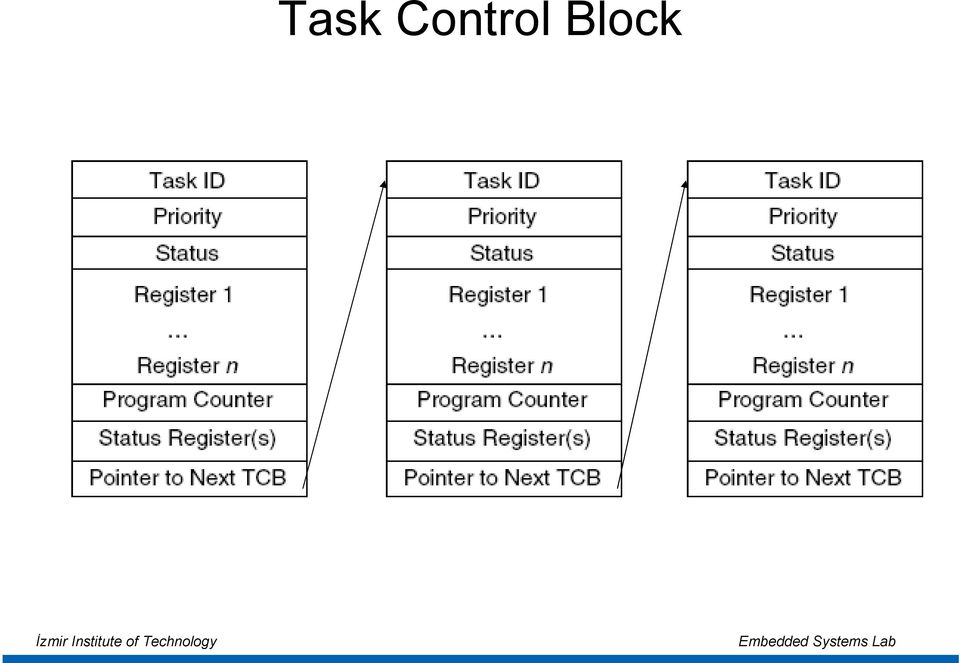
4 Task Control Block
5 RT Scheduling Among many functions, scheduling is the most important function of a real-time kernel A realtime application is composed of as a set of coordinated tasks. We can categorize the task according to their activation: Periodic tasks Sporadic tasks Aperiodic tasks Periodic tasks are started at regular intervals and has to be completed before some deadline. Sporadic tasks are appeared irregularly, but within a bounded frequency. Aperiodic tasks parameters are completely unknown.

6 RT Tasks We can use the following quintuple to express task τi: < τ i, bi, ci, fi, di> bi is begin time of τi ci is computation time of τi di is the deadline fi is the frequency (for sporadic tasks it s the bound) For schedulability, at least the following conditions must be met: ci < di bi < 1/fi Σci fi available resource

7 RT Tasks We can also categorize tasks according to their time criticality: Hard real-time tasks Soft real-time tasks Non real-time tasks (background tasks)

8 Simple Task Model All tasks in the task set are strictly periodic. The relative deadline of a task is equal to its period/frame. All tasks are independent; there are no precedence constraints. No task has any nonpreemptible section, and the cost of preemption is negligible. Only processing requirements are significant; memory and I/O requirements are negligible.

9 Scheduling Techniques Dynamic Scheduling Static priority-driven preemptive scheduling(rm) Dynamic priority-driven preemptive scheduling(edf) Adaptive scheduling(fc-edf) Round-Robin Scheduling Cooperative Scheduling Techniques... Static Scheduling AAA (algorithm architecture adequation)...

10 Round-Robin Scheduling Each executable task is assigned a fixed-time quantum called a time slice in which to execute. The task executes until it completes, or its execution time expires. Task switching occurs then. Round-robin systems can be combined with preemptive priority systems, yielding a kind of mixed system:

11 Cyclic Executives (1) Execution of periodic tasks on a processor according to a pre-run time schedule. CE is a table of procedure calls, where each task is a procedure, within a single do loop. The major cycle is the minimum time required to execute tasks allocated to the processor, ensuring that the deadlines and periods of all processes are met. Hyperperiod = LCM ( 2 T, T, K, T ) 1 n Scheduling decisions are made at the beginning of each frame. No preemption within each frame. Frames must be sufficiently long so that every task can start and complete within a single frame. R 1 : f max 1 i n c i
 1 n Scheduling decisions are made at the beginning of each frame. No preemption within each frame.")
12 Cyclic Executives (2) In order to keep the length of the cyclic schedule as short as possible, the frame size, f, should be chosen so that the hyperperiod has an integer number of frames: Ti Ti R2 : = f f In order to ensure that every task completes by its deadline, frames must be small so that between the release time and deadline of every task, there is at least one frame. The following relation is derived for a worst-case scenario, which occurs when the period of a process starts just after the beginning of a frame and, consequently, the process cannot be released until the next frame. 0 R 3 : 2 f gcd( T, f ) i D i

13 Example Frame Calculation Possible value of f could be any of the values of 3, 4 and 5.

14 Rate-Monotonic Scheduling Assumptions: 1. Simple task model: No interprocess communication and all tasks are periodic 2. Tasks have priorities which are inversly proportional to their periods. 3. Tasks deadlines are equal to their periods. 4. A high priority task may preempt lower priority tasks. Liu and Layland (1973) proved that for a set of n periodic tasks with unique periods, a feasible schedule that will always meet deadlines exists if the CPU utilization is: Where Ci is the computation time of a task i, Ti is the deadline of task i and n is the number of tasks. For example, for n=2, U
 proved that for a set of n periodic tasks with unique periods, a feasible schedule that will always meet deadlines exists if the")
15 Rate-Monotonic Scheduling When number of tasks approaches to infinity, this utilization bound will converge to: Example: Task Execution Time Period τ1 1 8 τ2 2 5 τ Thus, the system is schedulable

16 Sample Task Scheduling Three periodic tasks: A, B, C T is period, D is deadline and C is execution time uniprocessor

17 Earliest-Deadline-First Scheduling Priorities are changed dynamically Task with the earliest deadline gets the highest priority Unless RM, utilization may go up to 100%

18 RM vs.edf EDF is more flexible and achieves better utilization. RM is more predictable especially in overload conditions:the same lower-priority tasks miss deadlines every time. İn EDF, it is difficult to predict which tasks will miss their deadlines during overloads. RM tends to need more preemption. EDF only preempts when an earlier-deadline task arrives. For further discussion, read: Buttazzo, G. C Rate monotonic vs. EDF: judgment day. Real-Time Syst. 29, 1 (Jan. 2005), DOI=

19 Imprecise Computations In case that digital signal processing algorithms are performed, The system may get overloaded. For example, a Taylor series expansion (perhaps using look-up tables for function derivatives) can be terminated early, at a loss of accuracy, but with improved performance. Tasks can be divided into two parts: Mandatory and Optional. Various methods: Sieve, Multiple-versions etc. For example, a digital filtering task might be implemented as 4 versions such that each version has different filter characteristics, contributions and consequently computation requirements. In overload conditions, the scheduler may schedule shorter versions. Requires an adaptive scheduling algorithm. Their applications can be seen on network systems. See Stankovic s works for further details.

20 FC-EDF Scheduler Simulator

21 Critical Regions
22 Semaphores
23 Counting Semaphores If there are more than one resources:
24 Deadlock Four conditions are necessary for deadlock: 1. Mutual exclusion 2. Circular wait 3. Hold and wait 4. No preemption Eliminating any of them will prevent deadlock from occuring.
25 POSIX POSIX is the IEEE s Portable Operating System Interface for Computer Environments.The standard provides compliance criteria for operating system services and is designed to allow applications programs to write applications that can easily port across operating systems. For further details, read POSIX.pdf
26 RT-Linux RT-Linux is an operating system, in which a small real-time kernel co-exists with standard Linux kernel The real-time kernel sits between standard Linux kernel and the h/w. The standard Linux kernel sees this real-time layer as actual h/w The real-time kernel intercepts all hardware interrupts. Only for those RTLinux-related interrupts, the appropriate ISR is run. All other interrupts are held and passed to the standard Linux kernel as software interrupts when the standard Linux kernel runs. The real-time kernel assigns the lowest priority to the standard Linux kernel. Thus the realtime tasks will be executed in real-time user can create realtime tasks and achieve correct timing for them by deciding on scheduling algorithms, priorities, execution freq, etc. Realtime tasks are privileged (that is, they have direct access to hardware), and they do NOT use virtual memory.
27 RT-Linux
28 RT-Linux
29 Scheduler RT-Linux contains a dynamic scheduler RT-Linux has many kinds of schedulers The EDF (Earliest Deadline First) scheduler Rate-monotonic scheduler Real-time FIFOs RT-FIFOs are used to pass information between realtime process and ordinary Linux process. RT-FIFOs are designed to never block the real-time tasks. RT-FIFOs are, like realtime tasks, never page out. This eliminates the problem of unpredictable delay due to paging.
30 Time Resolution If the kernel was patched with UTIME, we could schedule processes with microsecond resolution. Running rtlinx-v3.0 Kernel on the 486 allows stable hard real-time operation. Giving: 15 microseconds worst case jitter. 10 microseconds event resolution. 17 nanoseconds timer resolution. 6 microseconds interrupt response time. (This value was measured on interrupts on the parallel port) High resolution timing functions give nanosecond resolution (limited by the hardware only)
31 Linux v.s. RTLinux Linux Non-real-time Features Linux scheduling algorithms are not designed for real-time tasks Provide good average performance or throughput Unpredictable delay Uninterruptible system calls, the use of interrupt disabling virtual memory support (context switch may take hundreds of microsecond). Linux Timer resolution is coarse, 10ms Linux Kernel is Non-preemptible. RTLinux Real-time Features Support real-time scheduling Predictable delay (by its small size and limited operations) Finer time resolution Preemptible kernel No virtual memory support
Real-Time Scheduling (Part 1) (Working Draft) Real-Time System Example
 (Working Draft) Real-Time System Example") Real-Time Scheduling (Part 1) (Working Draft) Insup Lee Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania www.cis.upenn.edu/~lee/ CIS 41,
Real-Time Scheduling (Part 1) (Working Draft) Insup Lee Department of Computer and Information Science School of Engineering and Applied Science University of Pennsylvania www.cis.upenn.edu/~lee/ CIS 41,
Lecture Outline Overview of real-time scheduling algorithms Outline relative strengths, weaknesses
 Overview of Real-Time Scheduling Embedded Real-Time Software Lecture 3 Lecture Outline Overview of real-time scheduling algorithms Clock-driven Weighted round-robin Priority-driven Dynamic vs. static Deadline
Overview of Real-Time Scheduling Embedded Real-Time Software Lecture 3 Lecture Outline Overview of real-time scheduling algorithms Clock-driven Weighted round-robin Priority-driven Dynamic vs. static Deadline
Real-time Scheduling of Periodic Tasks (1) Advanced Operating Systems Lecture 2
 Advanced Operating Systems Lecture 2") Real-time Scheduling of Periodic Tasks (1) Advanced Operating Systems Lecture 2 Lecture Outline Scheduling periodic tasks The rate monotonic algorithm Definition Non-optimality Time-demand analysis...
Real-time Scheduling of Periodic Tasks (1) Advanced Operating Systems Lecture 2 Lecture Outline Scheduling periodic tasks The rate monotonic algorithm Definition Non-optimality Time-demand analysis...
Periodic Task Scheduling
 Periodic Task Scheduling Radek Pelánek Motivation and Assumptions Examples of Periodic Tasks sensory data acquisition control loops action planning system monitoring Motivation and Assumptions Simplifying
Periodic Task Scheduling Radek Pelánek Motivation and Assumptions Examples of Periodic Tasks sensory data acquisition control loops action planning system monitoring Motivation and Assumptions Simplifying
Predictable response times in event-driven real-time systems
 Predictable response times in event-driven real-time systems Automotive 2006 - Security and Reliability in Automotive Systems Stuttgart, October 2006. Presented by: Michael González Harbour [email protected]
Predictable response times in event-driven real-time systems Automotive 2006 - Security and Reliability in Automotive Systems Stuttgart, October 2006. Presented by: Michael González Harbour [email protected]
Comparison between scheduling algorithms in RTLinux and VxWorks
 Comparison between scheduling algorithms in RTLinux and VxWorks Linköpings Universitet Linköping 2006-11-19 Daniel Forsberg ([email protected]) Magnus Nilsson ([email protected]) Abstract The
Comparison between scheduling algorithms in RTLinux and VxWorks Linköpings Universitet Linköping 2006-11-19 Daniel Forsberg ([email protected]) Magnus Nilsson ([email protected]) Abstract The
174: Scheduling Systems. Emil Michta University of Zielona Gora, Zielona Gora, Poland 1 TIMING ANALYSIS IN NETWORKED MEASUREMENT CONTROL SYSTEMS
 174: Scheduling Systems Emil Michta University of Zielona Gora, Zielona Gora, Poland 1 Timing Analysis in Networked Measurement Control Systems 1 2 Introduction to Scheduling Systems 2 3 Scheduling Theory
174: Scheduling Systems Emil Michta University of Zielona Gora, Zielona Gora, Poland 1 Timing Analysis in Networked Measurement Control Systems 1 2 Introduction to Scheduling Systems 2 3 Scheduling Theory
Real-Time Systems Prof. Dr. Rajib Mall Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur
 Real-Time Systems Prof. Dr. Rajib Mall Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture No. # 26 Real - Time POSIX. (Contd.) Ok Good morning, so let us get
Real-Time Systems Prof. Dr. Rajib Mall Department of Computer Science and Engineering Indian Institute of Technology, Kharagpur Lecture No. # 26 Real - Time POSIX. (Contd.) Ok Good morning, so let us get
4. Fixed-Priority Scheduling
 Simple workload model 4. Fixed-Priority Scheduling Credits to A. Burns and A. Wellings The application is assumed to consist of a fixed set of tasks All tasks are periodic with known periods This defines
Simple workload model 4. Fixed-Priority Scheduling Credits to A. Burns and A. Wellings The application is assumed to consist of a fixed set of tasks All tasks are periodic with known periods This defines
3. Scheduling issues. Common approaches /1. Common approaches /2. Common approaches /3. 2012/13 UniPD / T. Vardanega 23/01/2013. Real-Time Systems 1
 Common approaches /1 3. Scheduling issues Clock-driven (time-driven) scheduling Scheduling decisions are made beforehand (off line) and carried out at predefined time instants The time instants normally
Common approaches /1 3. Scheduling issues Clock-driven (time-driven) scheduling Scheduling decisions are made beforehand (off line) and carried out at predefined time instants The time instants normally
CPU SCHEDULING (CONT D) NESTED SCHEDULING FUNCTIONS
 NESTED SCHEDULING FUNCTIONS") CPU SCHEDULING CPU SCHEDULING (CONT D) Aims to assign processes to be executed by the CPU in a way that meets system objectives such as response time, throughput, and processor efficiency Broken down into
CPU SCHEDULING CPU SCHEDULING (CONT D) Aims to assign processes to be executed by the CPU in a way that meets system objectives such as response time, throughput, and processor efficiency Broken down into
The simple case: Cyclic execution
 The simple case: Cyclic execution SCHEDULING PERIODIC TASKS Repeat a set of aperiodic tasks at a specific rate (cycle) 1 2 Periodic tasks Periodic tasks (the simplified case) Scheduled to run Arrival time
The simple case: Cyclic execution SCHEDULING PERIODIC TASKS Repeat a set of aperiodic tasks at a specific rate (cycle) 1 2 Periodic tasks Periodic tasks (the simplified case) Scheduled to run Arrival time
A Survey of Fitting Device-Driver Implementations into Real-Time Theoretical Schedulability Analysis
 A Survey of Fitting Device-Driver Implementations into Real-Time Theoretical Schedulability Analysis Mark Stanovich Florida State University, USA Contents 1 Introduction 2 2 Scheduling Theory 3 2.1 Workload
A Survey of Fitting Device-Driver Implementations into Real-Time Theoretical Schedulability Analysis Mark Stanovich Florida State University, USA Contents 1 Introduction 2 2 Scheduling Theory 3 2.1 Workload
Priority-Driven Scheduling
 Priority-Driven Scheduling Advantages of Priority-Driven Scheduling Priority-driven scheduling is easy to implement. It does not require the information on the release times and execution times of the
Priority-Driven Scheduling Advantages of Priority-Driven Scheduling Priority-driven scheduling is easy to implement. It does not require the information on the release times and execution times of the
Module 6. Embedded System Software. Version 2 EE IIT, Kharagpur 1
 Module 6 Embedded System Software Version 2 EE IIT, Kharagpur 1 Lesson 30 Real-Time Task Scheduling Part 2 Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson, the
Module 6 Embedded System Software Version 2 EE IIT, Kharagpur 1 Lesson 30 Real-Time Task Scheduling Part 2 Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson, the
Common Approaches to Real-Time Scheduling
 Common Approaches to Real-Time Scheduling Clock-driven time-driven schedulers Priority-driven schedulers Examples of priority driven schedulers Effective timing constraints The Earliest-Deadline-First
Common Approaches to Real-Time Scheduling Clock-driven time-driven schedulers Priority-driven schedulers Examples of priority driven schedulers Effective timing constraints The Earliest-Deadline-First
Real-time scheduling algorithms, task visualization
 Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 2006 Real-time scheduling algorithms, task visualization Kevin Churnetski Follow this and additional works at:
Rochester Institute of Technology RIT Scholar Works Theses Thesis/Dissertation Collections 2006 Real-time scheduling algorithms, task visualization Kevin Churnetski Follow this and additional works at:
Real-Time Scheduling 1 / 39
 Real-Time Scheduling 1 / 39 Multiple Real-Time Processes A runs every 30 msec; each time it needs 10 msec of CPU time B runs 25 times/sec for 15 msec C runs 20 times/sec for 5 msec For our equation, A
Real-Time Scheduling 1 / 39 Multiple Real-Time Processes A runs every 30 msec; each time it needs 10 msec of CPU time B runs 25 times/sec for 15 msec C runs 20 times/sec for 5 msec For our equation, A
Operating Systems. III. Scheduling. http://soc.eurecom.fr/os/
 Operating Systems Institut Mines-Telecom III. Scheduling Ludovic Apvrille [email protected] Eurecom, office 470 http://soc.eurecom.fr/os/ Outline Basics of Scheduling Definitions Switching
Operating Systems Institut Mines-Telecom III. Scheduling Ludovic Apvrille [email protected] Eurecom, office 470 http://soc.eurecom.fr/os/ Outline Basics of Scheduling Definitions Switching
Real- Time Scheduling
 Real- Time Scheduling Chenyang Lu CSE 467S Embedded Compu5ng Systems Readings Ø Single-Processor Scheduling: Hard Real-Time Computing Systems, by G. Buttazzo. q Chapter 4 Periodic Task Scheduling q Chapter
Real- Time Scheduling Chenyang Lu CSE 467S Embedded Compu5ng Systems Readings Ø Single-Processor Scheduling: Hard Real-Time Computing Systems, by G. Buttazzo. q Chapter 4 Periodic Task Scheduling q Chapter
The Design and Implementation of Real-Time Schedulers in RED-Linux
 The Design and Implementation of Real-Time Schedulers in RED-Linux KWEI-JAY LIN, SENIOR MEMBER, IEEE AND YU-CHUNG WANG Invited Paper Researchers in the real-time system community have designed and studied
The Design and Implementation of Real-Time Schedulers in RED-Linux KWEI-JAY LIN, SENIOR MEMBER, IEEE AND YU-CHUNG WANG Invited Paper Researchers in the real-time system community have designed and studied
How To Compare Real Time Scheduling To A Scheduled Scheduler On Linux On A Computer System With A Visualization System
 MS project proposal: A comparison of real-time scheduling algorithms using visualization of tasks and evaluation of real-time extensions to Linux Kevin Churnetski Computer Science-RIT 8/21/2003 Abstract:
MS project proposal: A comparison of real-time scheduling algorithms using visualization of tasks and evaluation of real-time extensions to Linux Kevin Churnetski Computer Science-RIT 8/21/2003 Abstract:
Aperiodic Task Scheduling
 Aperiodic Task Scheduling Jian-Jia Chen (slides are based on Peter Marwedel) TU Dortmund, Informatik 12 Germany Springer, 2010 2014 年 11 月 19 日 These slides use Microsoft clip arts. Microsoft copyright
Aperiodic Task Scheduling Jian-Jia Chen (slides are based on Peter Marwedel) TU Dortmund, Informatik 12 Germany Springer, 2010 2014 年 11 月 19 日 These slides use Microsoft clip arts. Microsoft copyright
CPU Scheduling. CPU Scheduling
 CPU Scheduling Electrical and Computer Engineering Stephen Kim ([email protected]) ECE/IUPUI RTOS & APPS 1 CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling
CPU Scheduling Electrical and Computer Engineering Stephen Kim ([email protected]) ECE/IUPUI RTOS & APPS 1 CPU Scheduling Basic Concepts Scheduling Criteria Scheduling Algorithms Multiple-Processor Scheduling
Real-Time Software. Basic Scheduling and Response-Time Analysis. René Rydhof Hansen. 21. september 2010
 Real-Time Software Basic Scheduling and Response-Time Analysis René Rydhof Hansen 21. september 2010 TSW (2010e) (Lecture 05) Real-Time Software 21. september 2010 1 / 28 Last Time Time in a real-time
Real-Time Software Basic Scheduling and Response-Time Analysis René Rydhof Hansen 21. september 2010 TSW (2010e) (Lecture 05) Real-Time Software 21. september 2010 1 / 28 Last Time Time in a real-time
2. is the number of processes that are completed per time unit. A) CPU utilization B) Response time C) Turnaround time D) Throughput
 CPU utilization B) Response time C) Turnaround time D) Throughput") Import Settings: Base Settings: Brownstone Default Highest Answer Letter: D Multiple Keywords in Same Paragraph: No Chapter: Chapter 5 Multiple Choice 1. Which of the following is true of cooperative scheduling?
Import Settings: Base Settings: Brownstone Default Highest Answer Letter: D Multiple Keywords in Same Paragraph: No Chapter: Chapter 5 Multiple Choice 1. Which of the following is true of cooperative scheduling?
Performance Comparison of RTOS
 Performance Comparison of RTOS Shahmil Merchant, Kalpen Dedhia Dept Of Computer Science. Columbia University Abstract: Embedded systems are becoming an integral part of commercial products today. Mobile
Performance Comparison of RTOS Shahmil Merchant, Kalpen Dedhia Dept Of Computer Science. Columbia University Abstract: Embedded systems are becoming an integral part of commercial products today. Mobile
Real Time Scheduling Basic Concepts. Radek Pelánek
 Real Time Scheduling Basic Concepts Radek Pelánek Basic Elements Model of RT System abstraction focus only on timing constraints idealization (e.g., zero switching time) Basic Elements Basic Notions task
Real Time Scheduling Basic Concepts Radek Pelánek Basic Elements Model of RT System abstraction focus only on timing constraints idealization (e.g., zero switching time) Basic Elements Basic Notions task
ICS 143 - Principles of Operating Systems
 ICS 143 - Principles of Operating Systems Lecture 5 - CPU Scheduling Prof. Nalini Venkatasubramanian [email protected] Note that some slides are adapted from course text slides 2008 Silberschatz. Some
ICS 143 - Principles of Operating Systems Lecture 5 - CPU Scheduling Prof. Nalini Venkatasubramanian [email protected] Note that some slides are adapted from course text slides 2008 Silberschatz. Some
Today. Intro to real-time scheduling Cyclic executives. Scheduling tables Frames Frame size constraints. Non-independent tasks Pros and cons
 Today Intro to real-time scheduling Cyclic executives Scheduling tables Frames Frame size constraints Generating schedules Non-independent tasks Pros and cons Real-Time Systems The correctness of a real-time
Today Intro to real-time scheduling Cyclic executives Scheduling tables Frames Frame size constraints Generating schedules Non-independent tasks Pros and cons Real-Time Systems The correctness of a real-time
W4118 Operating Systems. Instructor: Junfeng Yang
 W4118 Operating Systems Instructor: Junfeng Yang Outline Introduction to scheduling Scheduling algorithms 1 Direction within course Until now: interrupts, processes, threads, synchronization Mostly mechanisms
W4118 Operating Systems Instructor: Junfeng Yang Outline Introduction to scheduling Scheduling algorithms 1 Direction within course Until now: interrupts, processes, threads, synchronization Mostly mechanisms
Chapter 19: Real-Time Systems. Overview of Real-Time Systems. Objectives. System Characteristics. Features of Real-Time Systems
 Chapter 19: Real-Time Systems System Characteristics Features of Real-Time Systems Chapter 19: Real-Time Systems Implementing Real-Time Operating Systems Real-Time CPU Scheduling VxWorks 5.x 19.2 Silberschatz,
Chapter 19: Real-Time Systems System Characteristics Features of Real-Time Systems Chapter 19: Real-Time Systems Implementing Real-Time Operating Systems Real-Time CPU Scheduling VxWorks 5.x 19.2 Silberschatz,
Deciding which process to run. (Deciding which thread to run) Deciding how long the chosen process can run
 Deciding how long the chosen process can run") SFWR ENG 3BB4 Software Design 3 Concurrent System Design 2 SFWR ENG 3BB4 Software Design 3 Concurrent System Design 11.8 10 CPU Scheduling Chapter 11 CPU Scheduling Policies Deciding which process to run
SFWR ENG 3BB4 Software Design 3 Concurrent System Design 2 SFWR ENG 3BB4 Software Design 3 Concurrent System Design 11.8 10 CPU Scheduling Chapter 11 CPU Scheduling Policies Deciding which process to run
Exercises : Real-time Scheduling analysis
 Exercises : Real-time Scheduling analysis Frank Singhoff University of Brest June 2013 Exercise 1 : Fixed priority scheduling and Rate Monotonic priority assignment Given a set of tasks defined by the
Exercises : Real-time Scheduling analysis Frank Singhoff University of Brest June 2013 Exercise 1 : Fixed priority scheduling and Rate Monotonic priority assignment Given a set of tasks defined by the
Operating Systems Concepts: Chapter 7: Scheduling Strategies
 Operating Systems Concepts: Chapter 7: Scheduling Strategies Olav Beckmann Huxley 449 http://www.doc.ic.ac.uk/~ob3 Acknowledgements: There are lots. See end of Chapter 1. Home Page for the course: http://www.doc.ic.ac.uk/~ob3/teaching/operatingsystemsconcepts/
Operating Systems Concepts: Chapter 7: Scheduling Strategies Olav Beckmann Huxley 449 http://www.doc.ic.ac.uk/~ob3 Acknowledgements: There are lots. See end of Chapter 1. Home Page for the course: http://www.doc.ic.ac.uk/~ob3/teaching/operatingsystemsconcepts/
Effective Scheduling Algorithm and Scheduler Implementation for use with Time-Triggered Co-operative Architecture
 http://dx.doi.org/10.5755/j01.eee.20.6.7282 ELEKTRONIKA IR ELEKTROTECHNIKA, ISSN 1392 1215, VOL. 20, NO. 6, 2014 Effective Scheduling Algorithm and Scheduler Implementation for use with Time-Triggered
http://dx.doi.org/10.5755/j01.eee.20.6.7282 ELEKTRONIKA IR ELEKTROTECHNIKA, ISSN 1392 1215, VOL. 20, NO. 6, 2014 Effective Scheduling Algorithm and Scheduler Implementation for use with Time-Triggered
Module 8. Industrial Embedded and Communication Systems. Version 2 EE IIT, Kharagpur 1
 Module 8 Industrial Embedded and Communication Systems Version 2 EE IIT, Kharagpur 1 Lesson 37 Real-Time Operating Systems: Introduction and Process Management Version 2 EE IIT, Kharagpur 2 Instructional
Module 8 Industrial Embedded and Communication Systems Version 2 EE IIT, Kharagpur 1 Lesson 37 Real-Time Operating Systems: Introduction and Process Management Version 2 EE IIT, Kharagpur 2 Instructional
CPU Scheduling. Basic Concepts. Basic Concepts (2) Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems
 Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems") Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems Based on original slides by Silberschatz, Galvin and Gagne 1 Basic Concepts CPU I/O Burst Cycle Process execution
Basic Concepts Scheduling Criteria Scheduling Algorithms Batch systems Interactive systems Based on original slides by Silberschatz, Galvin and Gagne 1 Basic Concepts CPU I/O Burst Cycle Process execution
Enhancing the Monitoring of Real-Time Performance in Linux
 Master of Science Thesis Enhancing the Monitoring of Real-Time Performance in Linux Author: Nima Asadi [email protected] Supervisor: Mehrdad Saadatmand [email protected] Examiner: Mikael
Master of Science Thesis Enhancing the Monitoring of Real-Time Performance in Linux Author: Nima Asadi [email protected] Supervisor: Mehrdad Saadatmand [email protected] Examiner: Mikael
Operatin g Systems: Internals and Design Principle s. Chapter 10 Multiprocessor and Real-Time Scheduling Seventh Edition By William Stallings
 Operatin g Systems: Internals and Design Principle s Chapter 10 Multiprocessor and Real-Time Scheduling Seventh Edition By William Stallings Operating Systems: Internals and Design Principles Bear in mind,
Operatin g Systems: Internals and Design Principle s Chapter 10 Multiprocessor and Real-Time Scheduling Seventh Edition By William Stallings Operating Systems: Internals and Design Principles Bear in mind,
CPU Scheduling. Multitasking operating systems come in two flavours: cooperative multitasking and preemptive multitasking.
 CPU Scheduling The scheduler is the component of the kernel that selects which process to run next. The scheduler (or process scheduler, as it is sometimes called) can be viewed as the code that divides
CPU Scheduling The scheduler is the component of the kernel that selects which process to run next. The scheduler (or process scheduler, as it is sometimes called) can be viewed as the code that divides
Commonly Used Approaches to Real-Time Scheduling
 Integre Technical Publishing Co., Inc. Liu January 13, 2000 8:46 a.m. chap4 page 60 C H A P T E R 4 Commonly Used Approaches to Real-Time Scheduling This chapter provides a brief overview of three commonly
Integre Technical Publishing Co., Inc. Liu January 13, 2000 8:46 a.m. chap4 page 60 C H A P T E R 4 Commonly Used Approaches to Real-Time Scheduling This chapter provides a brief overview of three commonly
Scheduling 0 : Levels. High level scheduling: Medium level scheduling: Low level scheduling
 Scheduling 0 : Levels High level scheduling: Deciding whether another process can run is process table full? user process limit reached? load to swap space or memory? Medium level scheduling: Balancing
Scheduling 0 : Levels High level scheduling: Deciding whether another process can run is process table full? user process limit reached? load to swap space or memory? Medium level scheduling: Balancing
CPU Scheduling Outline
 CPU Scheduling Outline What is scheduling in the OS? What are common scheduling criteria? How to evaluate scheduling algorithms? What are common scheduling algorithms? How is thread scheduling different
CPU Scheduling Outline What is scheduling in the OS? What are common scheduling criteria? How to evaluate scheduling algorithms? What are common scheduling algorithms? How is thread scheduling different
Improvement of Scheduling Granularity for Deadline Scheduler
 Improvement of Scheduling Granularity for Deadline Scheduler Yoshitake Kobayashi Advanced Software Technology Group Corporate Software Engineering Center TOSHIBA CORPORATION Copyright 2012, Toshiba Corporation.
Improvement of Scheduling Granularity for Deadline Scheduler Yoshitake Kobayashi Advanced Software Technology Group Corporate Software Engineering Center TOSHIBA CORPORATION Copyright 2012, Toshiba Corporation.
Process Scheduling CS 241. February 24, 2012. Copyright University of Illinois CS 241 Staff
 Process Scheduling CS 241 February 24, 2012 Copyright University of Illinois CS 241 Staff 1 Announcements Mid-semester feedback survey (linked off web page) MP4 due Friday (not Tuesday) Midterm Next Tuesday,
Process Scheduling CS 241 February 24, 2012 Copyright University of Illinois CS 241 Staff 1 Announcements Mid-semester feedback survey (linked off web page) MP4 due Friday (not Tuesday) Midterm Next Tuesday,
Multiprocessor Scheduling and Scheduling in Linux Kernel 2.6
 Multiprocessor Scheduling and Scheduling in Linux Kernel 2.6 Winter Term 2008 / 2009 Jun.-Prof. Dr. André Brinkmann [email protected] Universität Paderborn PC² Agenda Multiprocessor and
Multiprocessor Scheduling and Scheduling in Linux Kernel 2.6 Winter Term 2008 / 2009 Jun.-Prof. Dr. André Brinkmann [email protected] Universität Paderborn PC² Agenda Multiprocessor and
Aperiodic Task Scheduling
 Aperiodic Task Scheduling Gerhard Fohler Mälardalen University, Sweden [email protected] Real-Time Systems Gerhard Fohler 2005 Non Periodic Tasks So far periodic events and tasks what about others?
Aperiodic Task Scheduling Gerhard Fohler Mälardalen University, Sweden [email protected] Real-Time Systems Gerhard Fohler 2005 Non Periodic Tasks So far periodic events and tasks what about others?
Operating System Aspects. Real-Time Systems. Resource Management Tasks
 Operating System Aspects Chapter 2: Basics Chapter 3: Multimedia Systems Communication Aspects and Services Multimedia Applications and Communication Multimedia Transfer and Control Protocols Quality of
Operating System Aspects Chapter 2: Basics Chapter 3: Multimedia Systems Communication Aspects and Services Multimedia Applications and Communication Multimedia Transfer and Control Protocols Quality of
REAL TIME OPERATING SYSTEMS. Lesson-10:
 REAL TIME OPERATING SYSTEMS Lesson-10: Real Time Operating System 1 1. Real Time Operating System Definition 2 Real Time A real time is the time which continuously increments at regular intervals after
REAL TIME OPERATING SYSTEMS Lesson-10: Real Time Operating System 1 1. Real Time Operating System Definition 2 Real Time A real time is the time which continuously increments at regular intervals after
Real-Time Operating Systems. http://soc.eurecom.fr/os/
 Institut Mines-Telecom Ludovic Apvrille [email protected] Eurecom, office 470 http://soc.eurecom.fr/os/ Outline 2/66 Fall 2014 Institut Mines-Telecom Definitions What is an Embedded
Institut Mines-Telecom Ludovic Apvrille [email protected] Eurecom, office 470 http://soc.eurecom.fr/os/ Outline 2/66 Fall 2014 Institut Mines-Telecom Definitions What is an Embedded
LAB 5: Scheduling Algorithms for Embedded Systems
 LAB 5: Scheduling Algorithms for Embedded Systems Say you have a robot that is exploring an area. The computer controlling the robot has a number of tasks to do: getting sensor input, driving the wheels,
LAB 5: Scheduling Algorithms for Embedded Systems Say you have a robot that is exploring an area. The computer controlling the robot has a number of tasks to do: getting sensor input, driving the wheels,
Embedded Systems. 6. Real-Time Operating Systems
 Embedded Systems 6. Real-Time Operating Systems Lothar Thiele 6-1 Contents of Course 1. Embedded Systems Introduction 2. Software Introduction 7. System Components 10. Models 3. Real-Time Models 4. Periodic/Aperiodic
Embedded Systems 6. Real-Time Operating Systems Lothar Thiele 6-1 Contents of Course 1. Embedded Systems Introduction 2. Software Introduction 7. System Components 10. Models 3. Real-Time Models 4. Periodic/Aperiodic
Resource Reservation & Resource Servers. Problems to solve
 Resource Reservation & Resource Servers Problems to solve Hard-deadline tasks may be Periodic or Sporadic (with a known minimum arrival time) or Non periodic (how to deal with this?) Soft-deadline tasks
Resource Reservation & Resource Servers Problems to solve Hard-deadline tasks may be Periodic or Sporadic (with a known minimum arrival time) or Non periodic (how to deal with this?) Soft-deadline tasks
OPERATING SYSTEMS SCHEDULING
 OPERATING SYSTEMS SCHEDULING Jerry Breecher 5: CPU- 1 CPU What Is In This Chapter? This chapter is about how to get a process attached to a processor. It centers around efficient algorithms that perform
OPERATING SYSTEMS SCHEDULING Jerry Breecher 5: CPU- 1 CPU What Is In This Chapter? This chapter is about how to get a process attached to a processor. It centers around efficient algorithms that perform
Objectives. Chapter 5: CPU Scheduling. CPU Scheduler. Non-preemptive and preemptive. Dispatcher. Alternating Sequence of CPU And I/O Bursts
 Objectives Chapter 5: CPU Scheduling Introduce CPU scheduling, which is the basis for multiprogrammed operating systems Describe various CPU-scheduling algorithms Discuss evaluation criteria for selecting
Objectives Chapter 5: CPU Scheduling Introduce CPU scheduling, which is the basis for multiprogrammed operating systems Describe various CPU-scheduling algorithms Discuss evaluation criteria for selecting
Modular Real-Time Linux
 Modular Real-Time Linux Shinpei Kato Department of Information and Computer Science, Keio University 3-14-1 Hiyoshi, Kohoku, Yokohama, Japan [email protected] Nobuyuki Yamasaki Department of Information
Modular Real-Time Linux Shinpei Kato Department of Information and Computer Science, Keio University 3-14-1 Hiyoshi, Kohoku, Yokohama, Japan [email protected] Nobuyuki Yamasaki Department of Information
RTAI. Antonio Barbalace [email protected]. (modified by M.Moro 2011) RTAI
 RTAI") Antonio Barbalace [email protected] (modified by M.Moro 2011) Real Time Application Interface by Dipartimento di Ingegneria Aereospaziale dell Università di Milano (DIAPM) It is not a complete
Antonio Barbalace [email protected] (modified by M.Moro 2011) Real Time Application Interface by Dipartimento di Ingegneria Aereospaziale dell Università di Milano (DIAPM) It is not a complete
Hard Real-Time Linux
 Hard Real-Time Linux (or: How to Get RT Performances Using Linux) Andrea Bastoni University of Rome Tor Vergata System Programming Research Group [email protected] Linux Kernel Hacking Free Course
Hard Real-Time Linux (or: How to Get RT Performances Using Linux) Andrea Bastoni University of Rome Tor Vergata System Programming Research Group [email protected] Linux Kernel Hacking Free Course
Comp 204: Computer Systems and Their Implementation. Lecture 12: Scheduling Algorithms cont d
 Comp 204: Computer Systems and Their Implementation Lecture 12: Scheduling Algorithms cont d 1 Today Scheduling continued Multilevel queues Examples Thread scheduling 2 Question A starvation-free job-scheduling
Comp 204: Computer Systems and Their Implementation Lecture 12: Scheduling Algorithms cont d 1 Today Scheduling continued Multilevel queues Examples Thread scheduling 2 Question A starvation-free job-scheduling
Implementing and Using Execution Time Clocks in Ada Hard Real-Time Applications
 Implementing and Using Execution Time Clocks in Ada Hard Real-Time Applications By: M. González Harbour, M. Aldea Rivas, J.J. Gutiérrez García, and J.C. Palencia Gutiérrez Departamento de Electrónica y
Implementing and Using Execution Time Clocks in Ada Hard Real-Time Applications By: M. González Harbour, M. Aldea Rivas, J.J. Gutiérrez García, and J.C. Palencia Gutiérrez Departamento de Electrónica y
What is best for embedded development? Do most embedded projects still need an RTOS?
 RTOS versus GPOS: What is best for embedded development? Do most embedded projects still need an RTOS? It is a good question, given the speed of today s high-performance processors and the availability
RTOS versus GPOS: What is best for embedded development? Do most embedded projects still need an RTOS? It is a good question, given the speed of today s high-performance processors and the availability
Processor Scheduling. Queues Recall OS maintains various queues
 Processor Scheduling Chapters 9 and 10 of [OS4e], Chapter 6 of [OSC]: Queues Scheduling Criteria Cooperative versus Preemptive Scheduling Scheduling Algorithms Multi-level Queues Multiprocessor and Real-Time
Processor Scheduling Chapters 9 and 10 of [OS4e], Chapter 6 of [OSC]: Queues Scheduling Criteria Cooperative versus Preemptive Scheduling Scheduling Algorithms Multi-level Queues Multiprocessor and Real-Time
Scheduling of Real- Time processes, strategies and analysis
 FYS 4220 / 9220 2011 / #7 Real Time and Embedded Data Systems and Computing Scheduling of Real- Time processes, strategies and analysis T.B. Skaali, Department of Physics, University of Oslo) Some definitions
FYS 4220 / 9220 2011 / #7 Real Time and Embedded Data Systems and Computing Scheduling of Real- Time processes, strategies and analysis T.B. Skaali, Department of Physics, University of Oslo) Some definitions
CPU Scheduling. Core Definitions
 CPU Scheduling General rule keep the CPU busy; an idle CPU is a wasted CPU Major source of CPU idleness: I/O (or waiting for it) Many programs have a characteristic CPU I/O burst cycle alternating phases
CPU Scheduling General rule keep the CPU busy; an idle CPU is a wasted CPU Major source of CPU idleness: I/O (or waiting for it) Many programs have a characteristic CPU I/O burst cycle alternating phases
Scheduling. Scheduling. Scheduling levels. Decision to switch the running process can take place under the following circumstances:
 Scheduling Scheduling Scheduling levels Long-term scheduling. Selects which jobs shall be allowed to enter the system. Only used in batch systems. Medium-term scheduling. Performs swapin-swapout operations
Scheduling Scheduling Scheduling levels Long-term scheduling. Selects which jobs shall be allowed to enter the system. Only used in batch systems. Medium-term scheduling. Performs swapin-swapout operations
Introduction. Scheduling. Types of scheduling. The basics
 Introduction In multiprogramming systems, when there is more than one runable (i.e., ready), the operating system must decide which one to activate. The decision is made by the part of the operating system
Introduction In multiprogramming systems, when there is more than one runable (i.e., ready), the operating system must decide which one to activate. The decision is made by the part of the operating system
Tasks Schedule Analysis in RTAI/Linux-GPL
 Tasks Schedule Analysis in RTAI/Linux-GPL Claudio Aciti and Nelson Acosta INTIA - Depto de Computación y Sistemas - Facultad de Ciencias Exactas Universidad Nacional del Centro de la Provincia de Buenos
Tasks Schedule Analysis in RTAI/Linux-GPL Claudio Aciti and Nelson Acosta INTIA - Depto de Computación y Sistemas - Facultad de Ciencias Exactas Universidad Nacional del Centro de la Provincia de Buenos
Linux 2.4. Linux. Windows
 Linux 2.4 Non-preemptible kernel A system call might take long time to complete Coarse timer resolution Tasks can be released only with 10ms precision Virtual memory Introduces unpredictable amount of
Linux 2.4 Non-preemptible kernel A system call might take long time to complete Coarse timer resolution Tasks can be released only with 10ms precision Virtual memory Introduces unpredictable amount of
Quality of Service su Linux: Passato Presente e Futuro
 Quality of Service su Linux: Passato Presente e Futuro Luca Abeni [email protected] Università di Trento Quality of Service su Linux:Passato Presente e Futuro p. 1 Quality of Service Time Sensitive applications
Quality of Service su Linux: Passato Presente e Futuro Luca Abeni [email protected] Università di Trento Quality of Service su Linux:Passato Presente e Futuro p. 1 Quality of Service Time Sensitive applications
4003-440/4003-713 Operating Systems I. Process Scheduling. Warren R. Carithers ([email protected]) Rob Duncan ([email protected])
 Rob Duncan (rwd@cs.rit.edu)") 4003-440/4003-713 Operating Systems I Process Scheduling Warren R. Carithers ([email protected]) Rob Duncan ([email protected]) Review: Scheduling Policy Ideally, a scheduling policy should: Be: fair, predictable
4003-440/4003-713 Operating Systems I Process Scheduling Warren R. Carithers ([email protected]) Rob Duncan ([email protected]) Review: Scheduling Policy Ideally, a scheduling policy should: Be: fair, predictable
Partition Scheduling in APEX Runtime Environment for Embedded Avionics Software
 Partition Scheduling in APEX Runtime Environment for Embedded Avionics Software Yang-Hang Lee CISE Department, University of Florida Gainesville, FL 32611 Phone: (352) 392-1536 Fax: (352) 392-1220 Email:
Partition Scheduling in APEX Runtime Environment for Embedded Avionics Software Yang-Hang Lee CISE Department, University of Florida Gainesville, FL 32611 Phone: (352) 392-1536 Fax: (352) 392-1220 Email:
Jorix kernel: real-time scheduling
 Jorix kernel: real-time scheduling Joris Huizer Kwie Min Wong May 16, 2007 1 Introduction As a specialized part of the kernel, we implemented two real-time scheduling algorithms: RM (rate monotonic) and
Jorix kernel: real-time scheduling Joris Huizer Kwie Min Wong May 16, 2007 1 Introduction As a specialized part of the kernel, we implemented two real-time scheduling algorithms: RM (rate monotonic) and
Multi-core real-time scheduling
 Multi-core real-time scheduling Credits: Anne-Marie Déplanche, Irccyn, Nantes (many slides come from her presentation at ETR, Brest, September 2011) 1 Multi-core real-time scheduling! Introduction: problem
Multi-core real-time scheduling Credits: Anne-Marie Déplanche, Irccyn, Nantes (many slides come from her presentation at ETR, Brest, September 2011) 1 Multi-core real-time scheduling! Introduction: problem
HARD REAL-TIME SCHEDULING: THE DEADLINE-MONOTONIC APPROACH 1. Department of Computer Science, University of York, York, YO1 5DD, England.
 HARD REAL-TIME SCHEDULING: THE DEADLINE-MONOTONIC APPROACH 1 N C Audsley A Burns M F Richardson A J Wellings Department of Computer Science, University of York, York, YO1 5DD, England ABSTRACT The scheduling
HARD REAL-TIME SCHEDULING: THE DEADLINE-MONOTONIC APPROACH 1 N C Audsley A Burns M F Richardson A J Wellings Department of Computer Science, University of York, York, YO1 5DD, England ABSTRACT The scheduling
CPU Scheduling. CSC 256/456 - Operating Systems Fall 2014. TA: Mohammad Hedayati
 CPU Scheduling CSC 256/456 - Operating Systems Fall 2014 TA: Mohammad Hedayati Agenda Scheduling Policy Criteria Scheduling Policy Options (on Uniprocessor) Multiprocessor scheduling considerations CPU
CPU Scheduling CSC 256/456 - Operating Systems Fall 2014 TA: Mohammad Hedayati Agenda Scheduling Policy Criteria Scheduling Policy Options (on Uniprocessor) Multiprocessor scheduling considerations CPU
REAL TIME OPERATING SYSTEMS. Lesson-18:
 REAL TIME OPERATING SYSTEMS Lesson-18: Round Robin Time Slicing of tasks of equal priorities 1 1. Common scheduling models 2 Common scheduling models Cooperative Scheduling of ready tasks in a circular
REAL TIME OPERATING SYSTEMS Lesson-18: Round Robin Time Slicing of tasks of equal priorities 1 1. Common scheduling models 2 Common scheduling models Cooperative Scheduling of ready tasks in a circular
Advanced Operating Systems (M) Dr Colin Perkins School of Computing Science University of Glasgow
 Dr Colin Perkins School of Computing Science University of Glasgow") Advanced Operating Systems (M) Dr Colin Perkins School of Computing Science University of Glasgow Rationale Radical changes to computing landscape; Desktop PC becoming irrelevant Heterogeneous, multicore,
Advanced Operating Systems (M) Dr Colin Perkins School of Computing Science University of Glasgow Rationale Radical changes to computing landscape; Desktop PC becoming irrelevant Heterogeneous, multicore,
Module 6. Embedded System Software. Version 2 EE IIT, Kharagpur 1
 Module 6 Embedded System Software Version 2 EE IIT, Kharagpur 1 Lesson 31 Concepts in Real-Time Operating Systems Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson,
Module 6 Embedded System Software Version 2 EE IIT, Kharagpur 1 Lesson 31 Concepts in Real-Time Operating Systems Version 2 EE IIT, Kharagpur 2 Specific Instructional Objectives At the end of this lesson,
Chapter 5 Process Scheduling
 Chapter 5 Process Scheduling CPU Scheduling Objective: Basic Scheduling Concepts CPU Scheduling Algorithms Why Multiprogramming? Maximize CPU/Resources Utilization (Based on Some Criteria) CPU Scheduling
Chapter 5 Process Scheduling CPU Scheduling Objective: Basic Scheduling Concepts CPU Scheduling Algorithms Why Multiprogramming? Maximize CPU/Resources Utilization (Based on Some Criteria) CPU Scheduling
Asymmetric Scheduling and Load Balancing for Real-Time on Linux SMP
 Asymmetric Scheduling and Load Balancing for Real-Time on Linux SMP Éric Piel, Philippe Marquet, Julien Soula, and Jean-Luc Dekeyser {Eric.Piel,Philippe.Marquet,Julien.Soula,Jean-Luc.Dekeyser}@lifl.fr
Asymmetric Scheduling and Load Balancing for Real-Time on Linux SMP Éric Piel, Philippe Marquet, Julien Soula, and Jean-Luc Dekeyser {Eric.Piel,Philippe.Marquet,Julien.Soula,Jean-Luc.Dekeyser}@lifl.fr
Long-term monitoring of apparent latency in PREEMPT RT Linux real-time systems
 Long-term monitoring of apparent latency in PREEMPT RT Linux real-time systems Carsten Emde Open Source Automation Development Lab (OSADL) eg Aichhalder Str. 39, 78713 Schramberg, Germany [email protected]
Long-term monitoring of apparent latency in PREEMPT RT Linux real-time systems Carsten Emde Open Source Automation Development Lab (OSADL) eg Aichhalder Str. 39, 78713 Schramberg, Germany [email protected]
Road Map. Scheduling. Types of Scheduling. Scheduling. CPU Scheduling. Job Scheduling. Dickinson College Computer Science 354 Spring 2010.
 Road Map Scheduling Dickinson College Computer Science 354 Spring 2010 Past: What an OS is, why we have them, what they do. Base hardware and support for operating systems Process Management Threads Present:
Road Map Scheduling Dickinson College Computer Science 354 Spring 2010 Past: What an OS is, why we have them, what they do. Base hardware and support for operating systems Process Management Threads Present:
Operating Systems Lecture #6: Process Management
 Lecture #6: Process Written by based on the lecture series of Dr. Dayou Li and the book Understanding 4th ed. by I.M.Flynn and A.McIver McHoes (2006) Department of Computer Science and Technology,., 2013
Lecture #6: Process Written by based on the lecture series of Dr. Dayou Li and the book Understanding 4th ed. by I.M.Flynn and A.McIver McHoes (2006) Department of Computer Science and Technology,., 2013
Improved Handling of Soft Aperiodic Tasks in Offline Scheduled Real-Time Systems using Total Bandwidth Server
 Improved Handling of Soft Aperiodic Tasks in Offline Scheduled Real-Time Systems using Total Bandwidth Server Gerhard Fohler, Tomas Lennvall Mälardalen University Västeras, Sweden gfr, tlv @mdh.se Giorgio
Improved Handling of Soft Aperiodic Tasks in Offline Scheduled Real-Time Systems using Total Bandwidth Server Gerhard Fohler, Tomas Lennvall Mälardalen University Västeras, Sweden gfr, tlv @mdh.se Giorgio
What is an RTOS? Introduction to Real-Time Operating Systems. So what is an RTOS?(contd)
") Introduction to Real-Time Operating Systems Mahesh Balasubramaniam What is an RTOS? An RTOS is a class of operating systems that are intended for real time-applications What is a real time application?
Introduction to Real-Time Operating Systems Mahesh Balasubramaniam What is an RTOS? An RTOS is a class of operating systems that are intended for real time-applications What is a real time application?
Operating Systems, 6 th ed. Test Bank Chapter 7
 True / False Questions: Chapter 7 Memory Management 1. T / F In a multiprogramming system, main memory is divided into multiple sections: one for the operating system (resident monitor, kernel) and one
True / False Questions: Chapter 7 Memory Management 1. T / F In a multiprogramming system, main memory is divided into multiple sections: one for the operating system (resident monitor, kernel) and one
Scheduling. Yücel Saygın. These slides are based on your text book and on the slides prepared by Andrew S. Tanenbaum
 Scheduling Yücel Saygın These slides are based on your text book and on the slides prepared by Andrew S. Tanenbaum 1 Scheduling Introduction to Scheduling (1) Bursts of CPU usage alternate with periods
Scheduling Yücel Saygın These slides are based on your text book and on the slides prepared by Andrew S. Tanenbaum 1 Scheduling Introduction to Scheduling (1) Bursts of CPU usage alternate with periods
Linux scheduler history. We will be talking about the O(1) scheduler
 scheduler") CPU Scheduling Linux scheduler history We will be talking about the O(1) scheduler SMP Support in 2.4 and 2.6 versions 2.4 Kernel 2.6 Kernel CPU1 CPU2 CPU3 CPU1 CPU2 CPU3 Linux Scheduling 3 scheduling
CPU Scheduling Linux scheduler history We will be talking about the O(1) scheduler SMP Support in 2.4 and 2.6 versions 2.4 Kernel 2.6 Kernel CPU1 CPU2 CPU3 CPU1 CPU2 CPU3 Linux Scheduling 3 scheduling
Job Scheduling Model
 Scheduling 1 Job Scheduling Model problem scenario: a set of jobs needs to be executed using a single server, on which only one job at a time may run for theith job, we have an arrival timea i and a run
Scheduling 1 Job Scheduling Model problem scenario: a set of jobs needs to be executed using a single server, on which only one job at a time may run for theith job, we have an arrival timea i and a run
10.04.2008. Thomas Fahrig Senior Developer Hypervisor Team. Hypervisor Architecture Terminology Goals Basics Details
 Thomas Fahrig Senior Developer Hypervisor Team Hypervisor Architecture Terminology Goals Basics Details Scheduling Interval External Interrupt Handling Reserves, Weights and Caps Context Switch Waiting
Thomas Fahrig Senior Developer Hypervisor Team Hypervisor Architecture Terminology Goals Basics Details Scheduling Interval External Interrupt Handling Reserves, Weights and Caps Context Switch Waiting