Online Learning for Fast Segmentation of Moving Objects
|
|
|
- Marilynn Clark
- 8 years ago
- Views:
Transcription
1 Online Learning for Fast Segmentation of Moving Objects Liam Ellis, Vasileios Zografos CVL, Linköping University, Linköping, Sweden Abstract. This work addresses the problem of fast, online segmentation of moving objects in video. We pose this as a discriminative online semi-supervised appearance learning task, where supervising labels are autonomously generated by a motion segmentation algorithm. The computational complexity of the approach is significantly reduced by performing learning and classification on oversegmented image regions (superpixels), rather than per pixel. In addition, we further exploit the sparse trajectories from the motion segmentation to obtain a simple model that encodes the spatial properties and location of objects at each frame. Fusing these complementary cues produces good object segmentations at very low computational cost. In contrast to previous work, the proposed approach (1) performs segmentation on-the-fly (allowing for applications where data arrives sequentially), (2) has no prior model of object types or objectness, and (3) operates at significantly reduced computational cost. The approach and its ability to learn, disambiguate and segment the moving objects in the scene is evaluated on a number of benchmark video sequences. 1 Introduction The task of segmenting moving objects in a sequence of images is a fundamental computer vision problem. It s applications include data compression, visual effects, tracking, object and activity recognition, and video annotation and retrieval. This work addresses the problem of fast, online segmentation of moving objects in video. We pose this as a discriminative online semi-supervised appearance learning task, where supervising labels are autonomously generated by a motion segmentation algorithm, applied on sparse point trajectories from interest point tracking. The motion segmentation weakly (and sometimes noisily) labels the moving objects in the scene, and an appearance classifier gradually learns their appearance. In addition to motion (sparse point trajectories) and appearance cues, we also incorporate (1) an efficient shape-location prior and (2) boundary information (from an initial image oversegmentation), to regularize and refine the learning process. Specifically, the learned appearance classifier is given supervising labels from two sources, first from the sparse segmented point trajectories (called the sparse update) and second by sampling the final segmentation obtained after fusing appearance, shape-location and boundary cues (dense update).
, rather than per pixel.")
2 2 L. Ellis & V. Zografos Fig.1. Basic idea of online semi-supervised learning for segmenting moving objects. Our method does not have a pre-determined or explicit notion of what an object looks like in the video. Instead its appearance is learned on-the-fly. By avoiding specific assumptions and strict object models, our method is generic. Our main contribution is an autonomous, semi-supervised online learning approach for fast and dense segmentation of moving objects in a video sequence from very sparse trajectories. In contrast to previous work, our proposed method (1) performs segmentation on-the-fly, allowing for applications where the data arrives sequentially; (2) has no prior model of object types or objectness and (3) operates at a significantly reduced computational cost. We analyze the components of our algorithm and experiment on challenging video sequences that demonstrate its performance and utility. An overview of the basic idea of online semi-supervised learning for segmenting moving objects is illustrated in Fig Related Work Dense segmentation of moving objects in monocular video sequences is an area that has received considerable attention over the years. Earlier approaches, such as [1 3] rely on the assumption that the background is either stationary or has a simple model, and that only the object of interest is moving. In [4] sparse color features are extracted and a Markov Random Field (MRF) model is used to infuse smoothness for segmentation of videos with little background motion. An improvement to [2] was introduced by [5] using a classifier-based learning approach to deal with a certain degree of background motion and situations where the foreground object is almost stationary. Unlike the proposed approach, all these methods use batch rather than online learning. Solutions such as [6] address the problem of object segmentation by using optical flow for estimating the motion of the scene. Their method, although robust under significant camera motion, cannot handle multiple objects and the optical flow computation makes it unsuitable for real-time applications.

3 Online Learning for Fast Segmentation of Moving Objects 3 Recently, [7] presented an unsupervised learning approach, which is suited to moving object segmentation when there is very little motion from the object and the camera. Unfortunately, their method is computationally expensive due to the dense optical flow calculation and the mixture of Gaussians (MoG) fitting of the appearance model. In addition, the whole video must be made available for offline batch processing. In [8] Lee et al. extract a series of keyframes in which object-like regions are more prominent. They achieve this by using a boundary preserving local feature that has been trained on a database of ground truth object segmentations. Matching these features in the image produces a shape prior that is combined with a basic color MoG model and fused inside a spatio-temporal MRF that is optimized via binary cuts. The method shows promise on realistic datasets, however computationally it is costly; the shape features require extensive training, and computing the prior takes several minutes per frame. Another notable example is the work by [9], on dynamic scenes with rapidly moving objects. Their method clusters pixels together based onmulti-scaleopticalflow,combinedwithlocalilluminationfeaturesinanmrf. Although their method is able to cope very well with highly dynamic objects, (due to motion blur or absence of texture), they can only return a small number of dense segments (object sub-parts) in each image. Brox et al. [10] described an unsupervised method for the segmentation of semi-dense trajectories from the analysis of motion cues over long image sequences. However, they use trajectories provided by [11] which are expensive to obtain. Also, since it relies on 2D motion information, it cannot disambiguate between 3D objects directly, so the authors have to use additional heuristics for merging. Theobjectsegmentationmethodin[12]buildsonpreviousresearchfrom[10]. They use semi-dense motion segmentation to generate a good initial labeling of the moving objects in the scene. Then a very accurate (and computationally expensive)multi-levelsuper-pixelgenerationmethodfrom[13]iscarriedouttogive strong shape priors that preserve the main borders between objects. Super-pixels are labeled and merged using the motion segmentation tracks and a multi-level variational approach. The results presented in [12] are very good and can easily deal with multiple objects. Due to the very costly components, this method is strictly an off-line approach. Even though our solution has certain similarities with the reviewed approaches, it has some unique properties. It is the only approach where a discriminative model of appearance is learned and updated online, supervised by sparse 3D motion features and regularized by shape-location cues and boundary sensitive region segmentations. No costly optimization step is required at the end, and we do not to need to estimate expensive generative models. In this paper, we have restricted the reviewed literature to methods dealing with segmentation of moving objects in video sequences. There is also the related and somewhat overlapping area of dense object segmentation for tracking, with a large number of highly relevant publications. Two notable such examples are the Hough based method by [14] and the older non-parametric approach by [15]. However, dense segmentation methods for tracking applications have different, often more relaxed performance criteria. For example, they tend
![In addition, the whole video must be made available for offline batch processing. In [8] Lee et al. extract a series of keyframes in which object-like regions are more prominent.](/docs-images/49/16687525/images/page_3.jpg "They achieve this by using a boundary preserving local feature that has been trained on a database of ground truth object segmentations.")
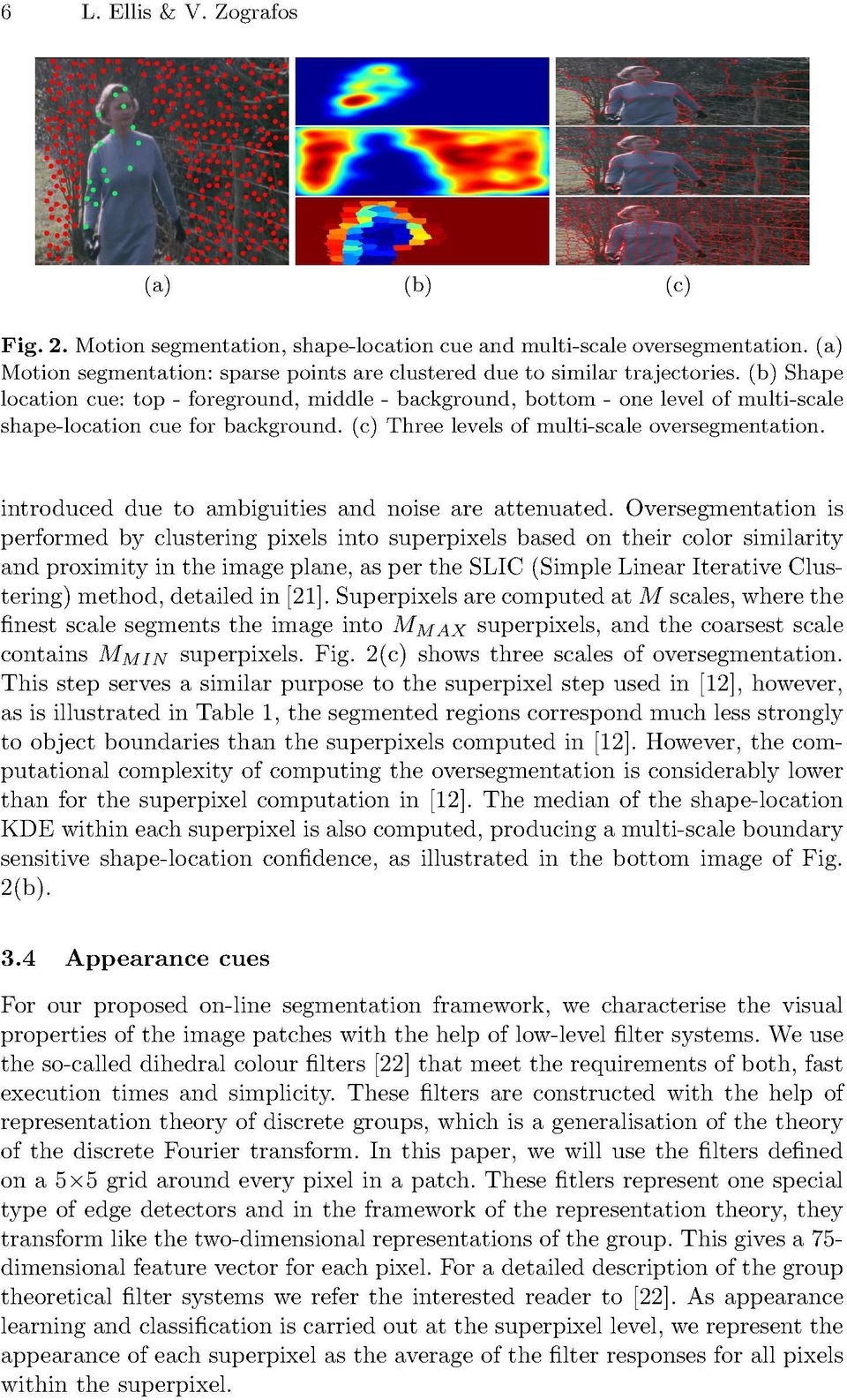
4 4 L. Ellis & V. Zografos to focus on an object centroid or bounding box and not on accurate boundaries that conform to the objects shapes. Furthermore, they often deal with 2 class foreground/background segmentation and usually require some user-based initialisation. These are the main reasons why we chose to restrict our attention to video object segmentation methods. 3 Our approach We propose an online approach, where segmentations are made at each frame based only on information from previous frames and a small local temporal window of size N (in our experiments, N = 10 frames). For each temporal window, point tracking yields a set of sparse trajectories {x sparse i } N i=1, where xsparse i = {x 1 j,x2 j }k j=1 is the set of sparse points in the ith frame in the temporal window, and k is the number of trajectories. Next, an unsupervised motion segmentation algorithm assigns labels to trajectories, giving set S = {x sparse i,y sparse i } N i=1, where y sparse i = {y j } k j=1, is the set of sparse labels in the ith frame in the temporal window, that identifies object assignment. See 3.1 for details. This set S, of sparse point-label pairs then drives the learning process. Labeled appearance samples (see 3.4) extracted from the point sets in S provide an initial sparse training set for a discriminative online appearance classifier. Additionally, a basic shape-location model for each object is built directly from S (see 3.2). To avoid the high computational complexity of performing learning and classification at the pixel level, and also to incorporate important boundary information, we employ an efficient multi-scale image oversegmentation. Discriminative learning and classification is carried out at the segmented region level, yielding boundary sensitive appearance classifications. (See 3.3). The fusion of these complementary cues (motion, shape-location and boundary sensitive appearance) yields segmented objects. Segmentations are then used tobootstraptheclassifierwithdenseappearancesamples,resultingingreatlyimproved segmentations in subsequent frames. The cue fusion and semi-supervised online appearance classifier learning algorithm are detailed in Motion Segmentation One of the main components of our proposed approach is a fast, unsupervised and non-parametric 3D motion segmentation algorithm. This is used in order to: 1) provide labeled samples for learning the appearance for each moving object; 2) provide labeled spatial coordinates for extraction of a basic shape-location model for every object in each frame. Since we require a motion segmentation algorithm that is both fast and reliable,wechoosethelcvmethodby[16],forwhichthereisavailablecomputer code. The LCV method takes as input a point trajectory matrix and outputs a column vector of labels that separate these trajectories into different objects (see Fig. 2(a)).Point trajectories are obtained byfirst computing a small number

5 Online Learning for Fast Segmentation of Moving Objects 5 of Good Features to Track [17]. These are tracked with a feature tracker [18] usinga track-retrack scheme,wherebypointsaretrackedfromoneframetothe next, and back again. Trajectories are rejected if there is sufficient disagreement in their initial and final point locations. Tracking is performed over a small temporal window and only trajectories that persist across the whole window are retained. The overall process yields an extremely sparse set of reliable labeled point trajectories over each temporal window (approximately 0.05% of image pixels, compared to 3% in [10]). The increased sparsity of points greatly reduces computational cost, but necessitates a semi-supervised learning algorithm that can exploit both labeled data (sparse points) and unlabeled data (all unlabeled pixels). 3.2 Shape-location cues It is important to use a basic shape-location model to weakly regularize the appearance learning process. An estimate of the shape, location and scale of each object is computed in every frame using a Kernel Density Estimate (KDE) [19] based on the sparse point-label pairs output by the motion segmentation, {x sparse,y sparse }. For each object, the 2D spatial distribution is estimated from the sparse point set associated with that object label. The set Ω = {1 : y sparse i = ω} is the set of indices for which the label is ω. The KDE for objects with label ω is defined as: ˆf H (x) = 1 Ω K H (x x i ), (1) i Ω and we use a Gaussian kernel with an automatically adapted bandwidth parameter H [20]. The shape KDE is estimated on sparse points and can be sampled densely to obtain a dense confidence map, S map. This model is robust to outliers that may occur due to motion segmentation errors and, in comparison to the shape priors computed in other works (c.f. [8]) it is highly computationally efficient. Additionally, the model is multi-modal, which is necessary for modeling, for instance, the background distribution. See Fig. 2(b) for an example shape-location model. 3.3 Multi-scale Oversegmentation To avoid the high computational complexity of performing learning and classification at the pixel level, and also to incorporate important boundary information, we employ an efficient multi-scale image oversegmentation. Discriminative learning and classification is then carried out at the segmented region level. Fusingtheregionclassificationconfidencesacrossallscalesyieldsboundarysensitive per-pixel labeling, and per-pixel classification confidences. By merging classification confidences of oversegmentations at multiple scales, region boundaries that are consistent across many scales are well emphasized, while those boundaries

6
7 Online Learning for Fast Segmentation of Moving Objects Semi-Supervised Online Appearance Classifier The unsupervised motion segmentation algorithm ( 3.1) provides sparse pointlabelpairs{x sparse i,y sparse i } N i=1 forasemi-supervisedonlineappearanceclassifier learning algorithm, where N is the number of labeled trajectories. The algorithm uses an Online Random Forest (ORF) classifier as the embedded classifier. Random Forests are an ensemble of randomized decision trees learnt from random bootstrap samples of the original data. In [23] the classifier was implemented as an online learning algorithm. Although experiments with other online classifiers (e.g. online boosting) produce similar results, the ORF is highly computationally efficient both in update and evaluate steps. There are two classifier update steps in our algorithm, a sparse update and a dense update. The sparse update is performed at each of the M scales of the oversegmentation, using the training set A Sparse = {Φ sparse i,k,y sparse i } N i=1, for k=1 : M, where {Φ sparse i,k } N i=1, denotes the appearance features extracted from the regions at scale k containing the points {x sparse i } N i=1. For each scale, the mean appearance of each labeled superpixel (those superpixels containing a tracked point labeled by the motion segmentation) is computed, and the classifier is updated with these labeled samples. Superpixels that contain labels from multiple classes are not used in the update, as they are likely to span multiple objects, these superpixels occur commonly at coarser scales. Also at each scale, all superpixels (including the unlabeled ones) are then evaluated by the classifier yielding multi-scale boundary sensitive appearance confidence maps. For the special case of superpixels that contain multiple different class labels, the confidence is set equal for each class, so that it has no impact on the final merged result. Still at each scale, the multi-scale shape-location and appearance classification confidence maps, (Smap k and A k map respectively) are fused with a simple linear combination sum 1 : D k = α A k map +(1 α) S k map (2) The next step is to combine the fused confidence maps, D k, from each scale, k, into a single confidence map. This is computed as the mean, at each pixel, of the fused confidence maps from each scale. D = 1 M M k=1 Dk. As D is computed as a per-pixel average, and due to the inconsistency of superpixel boundaries across scales, confidence boundaries in D are blurred. We therefore compute boundary sensitive version of D, at the finest superpixel level, by averaging the confidence values of D within each superpixel at the finest scale. This results in a confidence map that combines the classification results at all scales, regularized by the shape model, represented at the finest superpixel level. Dense labels, for each superpixel at the finest scale, are finally obtained by thresholding the combined confidence map. The dense update step updates the classifier with the training set A Dense ={Φ dense i,y dense i } M MAX i=1, where the dense labels are obtained from the final segmentation result from each frame. M MAX is the number of 1 All parameters settings are detailed in section 4

8 8 L. Ellis & V. Zografos Algorithm 1 Online Moving Object Segmentation Inputs: Sequence of images for all Temporal windows of N frames do Track: Obtain point trajectories, x sparse i Motion Segment: Obtain trajectory labels, y sparse i Over Segment: Obtain multi-scale superpixels. Sample Appearance: Sample labeled superpixels at each scale Sparse Update: Update classifier from A Sparse for i = 1 to N do for k = 1 to M do Evaluate Classifier: Obtain appearance confidence map, A k map Shape and Location: Obtain shape and location confidence maps, Smap k Cue Fusion: As in Eq. 2 end for Combine Scales: Compute per pixel average of fused confidence maps D = 1 M M k=1 Dk Compute Superpixel Confidence Map: Compute average confidence values of D within each superpixel at the finest scale Threshold: Threshold confidence map to obtain labels for each superpixel at finest scale Dense Update: Update classifier from A Dense end for end for Outputs: Moving object segmentations in all images superpixels at the finest scale, and {Φ dense i } M MAX i=1 are the mean appearance features in each superpixel at the finest scale. If the update were performed prior to the fusion step, the algorithm would be self-training i.e. a single-view weakly supervised algorithm [24]. Such algorithms can suffer from reinforcing feedback errors, i.e. initial misclassifications are included in the bootstrap training data, resulting in ever increasing classification errors. By updating the classifier with the post-fusion segmentation result, the learning process utilizes multiple views (appearance, shape) of the data. This multi-view approach constrains the learning process by only bootstrapping the classifier with data where there is agreement between the views. The complete online segmentation algorithm is detailed in Algorithm 1. 4 Implementation Details All timings quoted are based on a 64bit, 2.83 GHz Quad Core CPU with 4GB RAM. Tracking: Tracking over a 10 frame temporal window of images takes approximately 0.2sec and, depending on scene content, returns between 100 and 1000 trajectories. A track-retrack threshold of 0.3 pixels is used to reject unreliable trajectories.

9

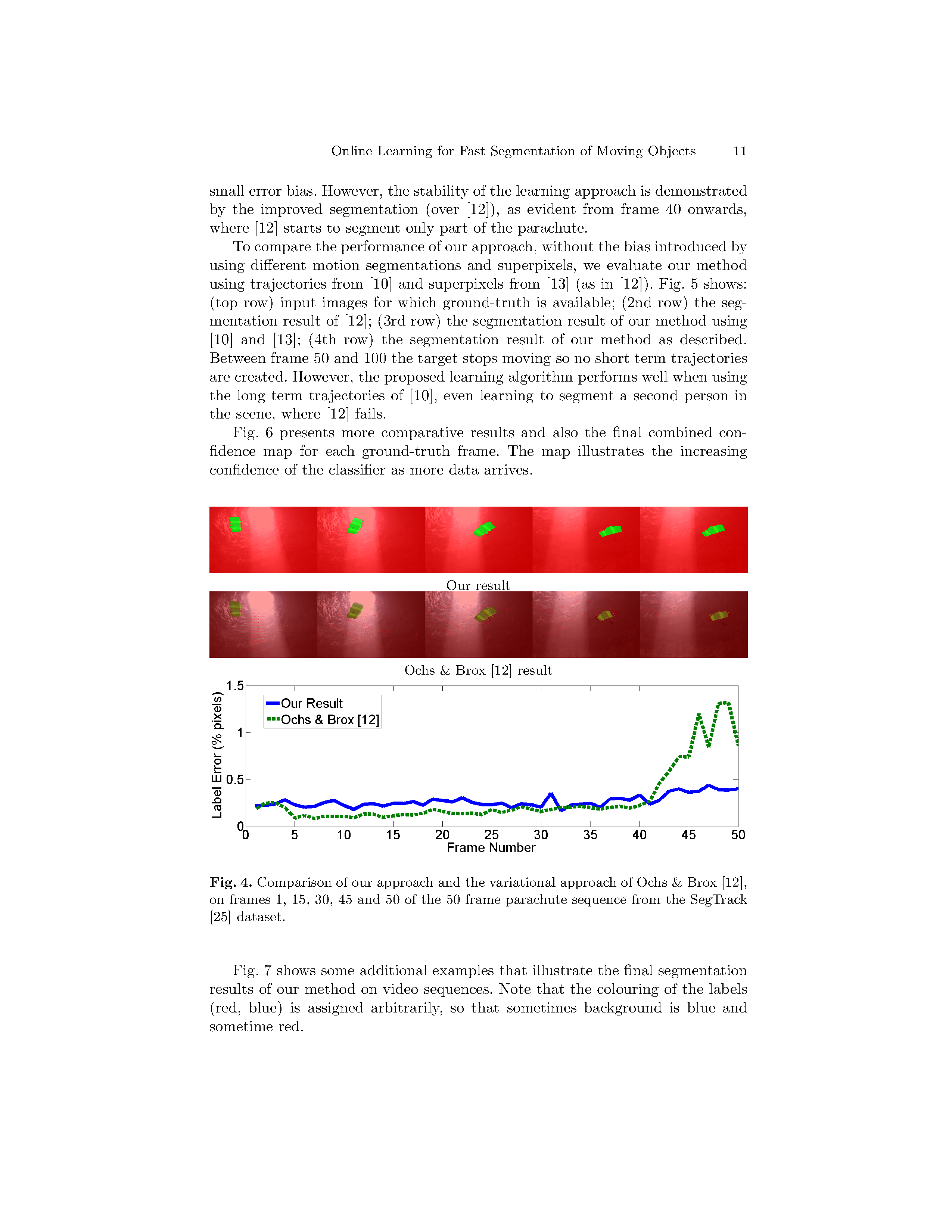
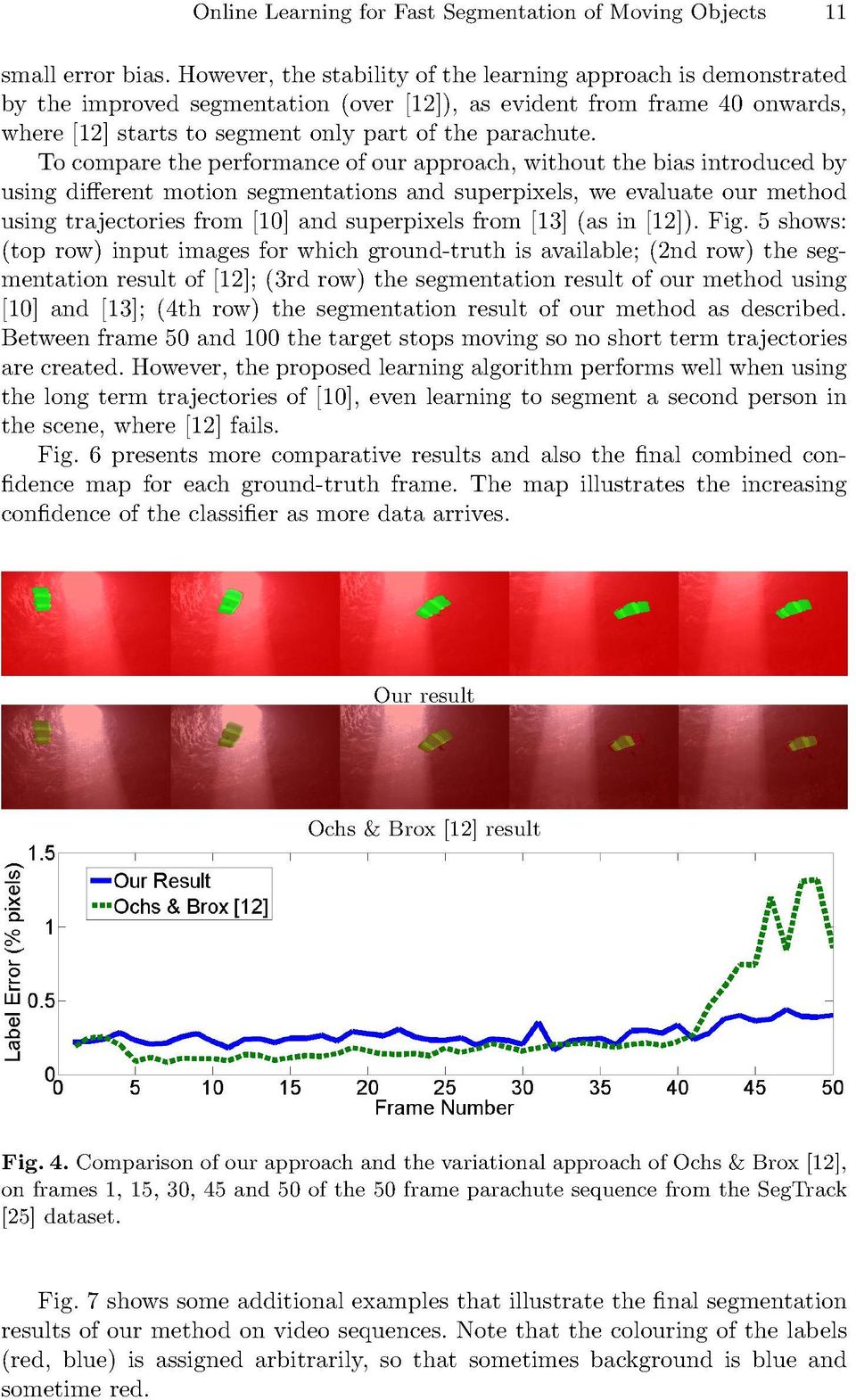
10 10 L. Ellis & V. Zografos in our method with that of a state-of-the-art method [12]. Table 1 shows both the runtime, and the result of the three main processes: (1) Segmented Trajectories (includes interest point tracking and clustering trajectories over a 10 frame window),(2)oversegmentation/superpixelcomputation,(3)objectsegmentation (for both methods, this includes all processes not carried out in process (1) or (2)). As can be seen, the computational cost for all the processes of our method are considerably lower than for [12]. It is also evident that both the segmented trajectories, and the superpixels used by [12] are closer to the final solution than our results. In fact the coarsest level superpixels obtained by [13] are already very close to the final solution. Note that the final segmentation results are for the 1st frame of the sequence, and due to the continuing updates of the appearance classifier, results on later images in the sequence are generally improved for our method. The times quoted are for the images shown, but are representative of all tested sequences. Fig. 3 shows the temporal evolution of object segmentations for three challenging sequences from the Berkeley Motion Segmentation Dataset [10]. It can be seen that, given a very poor initial discrimination between object and background appearance, by the end of the sequences, the classifier has learnt to effectively discriminate the object. Fig.3. Temporal evolution of object segmentations that illustrate the online learning aspect of the method. The three rows contain the Marple7, Marple11 and Tennis sequences respectively from [10]. Figs. 4, 5 and 6 show qualitative and quantitative comparisons to the variational approach of Ochs & Brox [12]. For each sequence, a labeling error is computed on each ground-truth frame. The error is an object size normalised sum of misclassified pixels. The normalization is obtained by dividing the misclassified pixel sum for each method, by the misclassified pixel sum of a trivial segmentation, that labels all pixels with one label. Fig.4showsresultsontheparachutesequence.Finedetailsandobjectboarders are less accurate due to the higher accuracy of [13] over [21], resulting in a

11
12

13

14 14 L. Ellis & V. Zografos Fig.7. Some additional examples that illustrate the final segmentation results of our method on video sequences. 11. Brox, T., Malik, J.: Large displacement optical flow: Descriptor matching in variational motion estimation. IEEE PAMI 33 (2011) Ochs, P., Brox, T.: Object segmentation in video: a hierarchical variational approach for turning point trajectories into dense regions. In: ICCV. (2011) 13. Arbelaez, P., Maire, M., Fowlkes, C., Malik, J.: Contour detection and hierarchical image segmentation. IEEE PAMI 33 (2011) Godec, M., Roth, P., Bischof, H.: Hough-based tracking of non-rigid objects. In: ICCV. (2011) Lu, L., Hager, G.D.: A nonparametric treatment on location/segmentation based visual tracking. In: CVPR. (2007) 16. Zografos, V., Nordberg, K.: Fast and accurate motion segmentation using linear combination of views. In: BMVC. (2011) Shi, J., Tomasi, C.: Good features to track. In: CVPR. (1994) Lucas, B.D.,.Kanade, T.: An iterative image registration technique with an application to stereo vision. In: Int. joint conference on A.I. Volume 2. (1981) Hwang, J.N., Lay, S.R., Lippman, A.: Nonparametric multivariate density estimation: A comparative study. IEEE Trans. Signal Processing 42 (1994) Botev, Z.I., Grotowski, J.F., Kroese, D.P.: Kernel density estimation via diffusion. Annals of Statistics (2010) 21. Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., Ssstrunk, S.: SLIC Superpixels Compared to State-of-the-art Superpixel Methods. IEEE PAMI (2012) 22. Lenz, R., Bui, H.T., Takase, K.: A group theoretical toolbox for color image operators. In: ICIP. Volume 3. (2005) Saffari, A., Leistner, C., Santner, J., Godec, M., Bischof, H.: On-line Random Forests. In: ICCV Workshops, IEEE (2009) Ng,V.,Cardie,C.: Weaklysupervisednaturallanguagelearningwithoutredundant views. In: NAACL. Volume 1. (2003) Tsai, D., Flagg, M., M.Rehg, J.: Motion coherent tracking with multi-label mrf optimization. BMVC (2010)
 898 916 14. Godec, M., Roth, P., Bischof, H.: Hough-based tracking of non-rigid objects. In: ICCV. (2011) 81 88 15. Lu, L.")
The Scientific Data Mining Process
 Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
Chapter 4 The Scientific Data Mining Process When I use a word, Humpty Dumpty said, in rather a scornful tone, it means just what I choose it to mean neither more nor less. Lewis Carroll [87, p. 214] In
LIBSVX and Video Segmentation Evaluation
 CVPR 14 Tutorial! 1! LIBSVX and Video Segmentation Evaluation Chenliang Xu and Jason J. Corso!! Computer Science and Engineering! SUNY at Buffalo!! Electrical Engineering and Computer Science! University
CVPR 14 Tutorial! 1! LIBSVX and Video Segmentation Evaluation Chenliang Xu and Jason J. Corso!! Computer Science and Engineering! SUNY at Buffalo!! Electrical Engineering and Computer Science! University
3D Model based Object Class Detection in An Arbitrary View
 3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
3D Model based Object Class Detection in An Arbitrary View Pingkun Yan, Saad M. Khan, Mubarak Shah School of Electrical Engineering and Computer Science University of Central Florida http://www.eecs.ucf.edu/
Practical Tour of Visual tracking. David Fleet and Allan Jepson January, 2006
 Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
Practical Tour of Visual tracking David Fleet and Allan Jepson January, 2006 Designing a Visual Tracker: What is the state? pose and motion (position, velocity, acceleration, ) shape (size, deformation,
MVA ENS Cachan. Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr
 Machine Learning for Computer Vision 1 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale Paris Galen
Machine Learning for Computer Vision 1 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale Paris Galen
Vision based Vehicle Tracking using a high angle camera
 Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu gramos@clemson.edu dshu@clemson.edu Abstract A vehicle tracking and grouping algorithm is presented in this work
Vision based Vehicle Tracking using a high angle camera Raúl Ignacio Ramos García Dule Shu gramos@clemson.edu dshu@clemson.edu Abstract A vehicle tracking and grouping algorithm is presented in this work
Tracking performance evaluation on PETS 2015 Challenge datasets
 Tracking performance evaluation on PETS 2015 Challenge datasets Tahir Nawaz, Jonathan Boyle, Longzhen Li and James Ferryman Computational Vision Group, School of Systems Engineering University of Reading,
Tracking performance evaluation on PETS 2015 Challenge datasets Tahir Nawaz, Jonathan Boyle, Longzhen Li and James Ferryman Computational Vision Group, School of Systems Engineering University of Reading,
Local features and matching. Image classification & object localization
 Overview Instance level search Local features and matching Efficient visual recognition Image classification & object localization Category recognition Image classification: assigning a class label to
Overview Instance level search Local features and matching Efficient visual recognition Image classification & object localization Category recognition Image classification: assigning a class label to
Edge tracking for motion segmentation and depth ordering
 Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
Edge tracking for motion segmentation and depth ordering P. Smith, T. Drummond and R. Cipolla Department of Engineering University of Cambridge Cambridge CB2 1PZ,UK {pas1001 twd20 cipolla}@eng.cam.ac.uk
A Learning Based Method for Super-Resolution of Low Resolution Images
 A Learning Based Method for Super-Resolution of Low Resolution Images Emre Ugur June 1, 2004 emre.ugur@ceng.metu.edu.tr Abstract The main objective of this project is the study of a learning based method
A Learning Based Method for Super-Resolution of Low Resolution Images Emre Ugur June 1, 2004 emre.ugur@ceng.metu.edu.tr Abstract The main objective of this project is the study of a learning based method
Human behavior analysis from videos using optical flow
 L a b o r a t o i r e I n f o r m a t i q u e F o n d a m e n t a l e d e L i l l e Human behavior analysis from videos using optical flow Yassine Benabbas Directeur de thèse : Chabane Djeraba Multitel
L a b o r a t o i r e I n f o r m a t i q u e F o n d a m e n t a l e d e L i l l e Human behavior analysis from videos using optical flow Yassine Benabbas Directeur de thèse : Chabane Djeraba Multitel
Optical Flow. Shenlong Wang CSC2541 Course Presentation Feb 2, 2016
 Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
Optical Flow Shenlong Wang CSC2541 Course Presentation Feb 2, 2016 Outline Introduction Variation Models Feature Matching Methods End-to-end Learning based Methods Discussion Optical Flow Goal: Pixel motion
Mean-Shift Tracking with Random Sampling
 1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
1 Mean-Shift Tracking with Random Sampling Alex Po Leung, Shaogang Gong Department of Computer Science Queen Mary, University of London, London, E1 4NS Abstract In this work, boosting the efficiency of
Tracking And Object Classification For Automated Surveillance
 Tracking And Object Classification For Automated Surveillance Omar Javed and Mubarak Shah Computer Vision ab, University of Central Florida, 4000 Central Florida Blvd, Orlando, Florida 32816, USA {ojaved,shah}@cs.ucf.edu
Tracking And Object Classification For Automated Surveillance Omar Javed and Mubarak Shah Computer Vision ab, University of Central Florida, 4000 Central Florida Blvd, Orlando, Florida 32816, USA {ojaved,shah}@cs.ucf.edu
Tracking Groups of Pedestrians in Video Sequences
 Tracking Groups of Pedestrians in Video Sequences Jorge S. Marques Pedro M. Jorge Arnaldo J. Abrantes J. M. Lemos IST / ISR ISEL / IST ISEL INESC-ID / IST Lisbon, Portugal Lisbon, Portugal Lisbon, Portugal
Tracking Groups of Pedestrians in Video Sequences Jorge S. Marques Pedro M. Jorge Arnaldo J. Abrantes J. M. Lemos IST / ISR ISEL / IST ISEL INESC-ID / IST Lisbon, Portugal Lisbon, Portugal Lisbon, Portugal
Colorado School of Mines Computer Vision Professor William Hoff
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Speed Performance Improvement of Vehicle Blob Tracking System
 Speed Performance Improvement of Vehicle Blob Tracking System Sung Chun Lee and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu, nevatia@usc.edu Abstract. A speed
Speed Performance Improvement of Vehicle Blob Tracking System Sung Chun Lee and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu, nevatia@usc.edu Abstract. A speed
Automatic parameter regulation for a tracking system with an auto-critical function
 Automatic parameter regulation for a tracking system with an auto-critical function Daniela Hall INRIA Rhône-Alpes, St. Ismier, France Email: Daniela.Hall@inrialpes.fr Abstract In this article we propose
Automatic parameter regulation for a tracking system with an auto-critical function Daniela Hall INRIA Rhône-Alpes, St. Ismier, France Email: Daniela.Hall@inrialpes.fr Abstract In this article we propose
Cees Snoek. Machine. Humans. Multimedia Archives. Euvision Technologies The Netherlands. University of Amsterdam The Netherlands. Tree.
 Visual search: what's next? Cees Snoek University of Amsterdam The Netherlands Euvision Technologies The Netherlands Problem statement US flag Tree Aircraft Humans Dog Smoking Building Basketball Table
Visual search: what's next? Cees Snoek University of Amsterdam The Netherlands Euvision Technologies The Netherlands Problem statement US flag Tree Aircraft Humans Dog Smoking Building Basketball Table
Environmental Remote Sensing GEOG 2021
 Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
Environmental Remote Sensing GEOG 2021 Lecture 4 Image classification 2 Purpose categorising data data abstraction / simplification data interpretation mapping for land cover mapping use land cover class
Object Segmentation by Long Term Analysis of Point Trajectories
 Object Segmentation by Long Term Analysis of Point Trajectories Thomas Brox 1,2 and Jitendra Malik 1 1 University of California at Berkeley 2 Albert-Ludwigs-University of Freiburg, Germany {brox,malik}@eecs.berkeley.edu
Object Segmentation by Long Term Analysis of Point Trajectories Thomas Brox 1,2 and Jitendra Malik 1 1 University of California at Berkeley 2 Albert-Ludwigs-University of Freiburg, Germany {brox,malik}@eecs.berkeley.edu
Behavior Analysis in Crowded Environments. XiaogangWang Department of Electronic Engineering The Chinese University of Hong Kong June 25, 2011
 Behavior Analysis in Crowded Environments XiaogangWang Department of Electronic Engineering The Chinese University of Hong Kong June 25, 2011 Behavior Analysis in Sparse Scenes Zelnik-Manor & Irani CVPR
Behavior Analysis in Crowded Environments XiaogangWang Department of Electronic Engineering The Chinese University of Hong Kong June 25, 2011 Behavior Analysis in Sparse Scenes Zelnik-Manor & Irani CVPR
VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS
 VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS Norbert Buch 1, Mark Cracknell 2, James Orwell 1 and Sergio A. Velastin 1 1. Kingston University, Penrhyn Road, Kingston upon Thames, KT1 2EE,
VEHICLE LOCALISATION AND CLASSIFICATION IN URBAN CCTV STREAMS Norbert Buch 1, Mark Cracknell 2, James Orwell 1 and Sergio A. Velastin 1 1. Kingston University, Penrhyn Road, Kingston upon Thames, KT1 2EE,
Character Image Patterns as Big Data
 22 International Conference on Frontiers in Handwriting Recognition Character Image Patterns as Big Data Seiichi Uchida, Ryosuke Ishida, Akira Yoshida, Wenjie Cai, Yaokai Feng Kyushu University, Fukuoka,
22 International Conference on Frontiers in Handwriting Recognition Character Image Patterns as Big Data Seiichi Uchida, Ryosuke Ishida, Akira Yoshida, Wenjie Cai, Yaokai Feng Kyushu University, Fukuoka,
Feature Tracking and Optical Flow
 02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
02/09/12 Feature Tracking and Optical Flow Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adapted from Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve
CI6227: Data Mining. Lesson 11b: Ensemble Learning. Data Analytics Department, Institute for Infocomm Research, A*STAR, Singapore.
 CI6227: Data Mining Lesson 11b: Ensemble Learning Sinno Jialin PAN Data Analytics Department, Institute for Infocomm Research, A*STAR, Singapore Acknowledgements: slides are adapted from the lecture notes
CI6227: Data Mining Lesson 11b: Ensemble Learning Sinno Jialin PAN Data Analytics Department, Institute for Infocomm Research, A*STAR, Singapore Acknowledgements: slides are adapted from the lecture notes
Real-Time Tracking of Pedestrians and Vehicles
 Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Real-Time Tracking of Pedestrians and Vehicles N.T. Siebel and S.J. Maybank. Computational Vision Group Department of Computer Science The University of Reading Reading RG6 6AY, England Abstract We present
Tracking in flussi video 3D. Ing. Samuele Salti
 Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
Seminari XXIII ciclo Tracking in flussi video 3D Ing. Tutors: Prof. Tullio Salmon Cinotti Prof. Luigi Di Stefano The Tracking problem Detection Object model, Track initiation, Track termination, Tracking
Interactive Offline Tracking for Color Objects
 Interactive Offline Tracking for Color Objects Yichen Wei Jian Sun Xiaoou Tang Heung-Yeung Shum Microsoft Research Asia, Beijing, China {yichenw,jiansun,xitang,hshum}@microsoft.com Abstract In this paper,
Interactive Offline Tracking for Color Objects Yichen Wei Jian Sun Xiaoou Tang Heung-Yeung Shum Microsoft Research Asia, Beijing, China {yichenw,jiansun,xitang,hshum}@microsoft.com Abstract In this paper,
Ensemble Methods. Knowledge Discovery and Data Mining 2 (VU) (707.004) Roman Kern. KTI, TU Graz 2015-03-05
 (707.004) Roman Kern. KTI, TU Graz 2015-03-05") Ensemble Methods Knowledge Discovery and Data Mining 2 (VU) (707004) Roman Kern KTI, TU Graz 2015-03-05 Roman Kern (KTI, TU Graz) Ensemble Methods 2015-03-05 1 / 38 Outline 1 Introduction 2 Classification
Ensemble Methods Knowledge Discovery and Data Mining 2 (VU) (707004) Roman Kern KTI, TU Graz 2015-03-05 Roman Kern (KTI, TU Graz) Ensemble Methods 2015-03-05 1 / 38 Outline 1 Introduction 2 Classification
Clustering Big Data. Anil K. Jain. (with Radha Chitta and Rong Jin) Department of Computer Science Michigan State University November 29, 2012
 Department of Computer Science Michigan State University November 29, 2012") Clustering Big Data Anil K. Jain (with Radha Chitta and Rong Jin) Department of Computer Science Michigan State University November 29, 2012 Outline Big Data How to extract information? Data clustering
Clustering Big Data Anil K. Jain (with Radha Chitta and Rong Jin) Department of Computer Science Michigan State University November 29, 2012 Outline Big Data How to extract information? Data clustering
LABEL PROPAGATION ON GRAPHS. SEMI-SUPERVISED LEARNING. ----Changsheng Liu 10-30-2014
 LABEL PROPAGATION ON GRAPHS. SEMI-SUPERVISED LEARNING ----Changsheng Liu 10-30-2014 Agenda Semi Supervised Learning Topics in Semi Supervised Learning Label Propagation Local and global consistency Graph
LABEL PROPAGATION ON GRAPHS. SEMI-SUPERVISED LEARNING ----Changsheng Liu 10-30-2014 Agenda Semi Supervised Learning Topics in Semi Supervised Learning Label Propagation Local and global consistency Graph
Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection
 CSED703R: Deep Learning for Visual Recognition (206S) Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 3 Object detection
CSED703R: Deep Learning for Visual Recognition (206S) Lecture 6: CNNs for Detection, Tracking, and Segmentation Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 3 Object detection
Segmentation & Clustering
 EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
Machine Learning for Medical Image Analysis. A. Criminisi & the InnerEye team @ MSRC
 Machine Learning for Medical Image Analysis A. Criminisi & the InnerEye team @ MSRC Medical image analysis the goal Automatic, semantic analysis and quantification of what observed in medical scans Brain
Machine Learning for Medical Image Analysis A. Criminisi & the InnerEye team @ MSRC Medical image analysis the goal Automatic, semantic analysis and quantification of what observed in medical scans Brain
Recognizing Cats and Dogs with Shape and Appearance based Models. Group Member: Chu Wang, Landu Jiang
 Recognizing Cats and Dogs with Shape and Appearance based Models Group Member: Chu Wang, Landu Jiang Abstract Recognizing cats and dogs from images is a challenging competition raised by Kaggle platform
Recognizing Cats and Dogs with Shape and Appearance based Models Group Member: Chu Wang, Landu Jiang Abstract Recognizing cats and dogs from images is a challenging competition raised by Kaggle platform
Two-Frame Motion Estimation Based on Polynomial Expansion
 Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden gf@isy.liu.se http://www.isy.liu.se/cvl/ Abstract.
Two-Frame Motion Estimation Based on Polynomial Expansion Gunnar Farnebäck Computer Vision Laboratory, Linköping University, SE-581 83 Linköping, Sweden gf@isy.liu.se http://www.isy.liu.se/cvl/ Abstract.
The Visual Internet of Things System Based on Depth Camera
 The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
The Visual Internet of Things System Based on Depth Camera Xucong Zhang 1, Xiaoyun Wang and Yingmin Jia Abstract The Visual Internet of Things is an important part of information technology. It is proposed
Autonomous Monitoring of Cliff Nesting Seabirds using Computer Vision
 Autonomous Monitoring of Cliff Nesting Seabirds using Computer Vision Patrick Dickinson 1, Robin Freeman 2, Sam Patrick 3 and Shaun Lawson 1 1 Dept. of Computing and Informatics University of Lincoln Lincoln
Autonomous Monitoring of Cliff Nesting Seabirds using Computer Vision Patrick Dickinson 1, Robin Freeman 2, Sam Patrick 3 and Shaun Lawson 1 1 Dept. of Computing and Informatics University of Lincoln Lincoln
Support Vector Machine-Based Human Behavior Classification in Crowd through Projection and Star Skeletonization
 Journal of Computer Science 6 (9): 1008-1013, 2010 ISSN 1549-3636 2010 Science Publications Support Vector Machine-Based Human Behavior Classification in Crowd through Projection and Star Skeletonization
Journal of Computer Science 6 (9): 1008-1013, 2010 ISSN 1549-3636 2010 Science Publications Support Vector Machine-Based Human Behavior Classification in Crowd through Projection and Star Skeletonization
Determining optimal window size for texture feature extraction methods
 IX Spanish Symposium on Pattern Recognition and Image Analysis, Castellon, Spain, May 2001, vol.2, 237-242, ISBN: 84-8021-351-5. Determining optimal window size for texture feature extraction methods Domènec
IX Spanish Symposium on Pattern Recognition and Image Analysis, Castellon, Spain, May 2001, vol.2, 237-242, ISBN: 84-8021-351-5. Determining optimal window size for texture feature extraction methods Domènec
Fast and Robust Variational Optical Flow for High-Resolution Images using SLIC Superpixels
 Fast and Robust Variational Optical Flow for High-Resolution Images using SLIC Superpixels Simon Donné, Jan Aelterman, Bart Goossens, and Wilfried Philips iminds-ipi-ugent {Simon.Donne,Jan.Aelterman,Bart.Goossens,philips}@telin.ugent.be
Fast and Robust Variational Optical Flow for High-Resolution Images using SLIC Superpixels Simon Donné, Jan Aelterman, Bart Goossens, and Wilfried Philips iminds-ipi-ugent {Simon.Donne,Jan.Aelterman,Bart.Goossens,philips}@telin.ugent.be
Geometric-Guided Label Propagation for Moving Object Detection
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Geometric-Guided Label Propagation for Moving Object Detection Kao, J.-Y.; Tian, D.; Mansour, H.; Ortega, A.; Vetro, A. TR2016-005 March 2016
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Geometric-Guided Label Propagation for Moving Object Detection Kao, J.-Y.; Tian, D.; Mansour, H.; Ortega, A.; Vetro, A. TR2016-005 March 2016
UNIVERSITY OF CENTRAL FLORIDA AT TRECVID 2003. Yun Zhai, Zeeshan Rasheed, Mubarak Shah
 UNIVERSITY OF CENTRAL FLORIDA AT TRECVID 2003 Yun Zhai, Zeeshan Rasheed, Mubarak Shah Computer Vision Laboratory School of Computer Science University of Central Florida, Orlando, Florida ABSTRACT In this
UNIVERSITY OF CENTRAL FLORIDA AT TRECVID 2003 Yun Zhai, Zeeshan Rasheed, Mubarak Shah Computer Vision Laboratory School of Computer Science University of Central Florida, Orlando, Florida ABSTRACT In this
FLEXSYS Motion-based Traffic Analysis and Incident Detection
 FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
FLEXSYS Motion-based Traffic Analysis and Incident Detection Authors: Lixin Yang and Hichem Sahli, IBBT/VUB-ETRO Contents.1 Introduction......................................... 1.2 Traffic flow modelling
ADVANCED MACHINE LEARNING. Introduction
 1 1 Introduction Lecturer: Prof. Aude Billard (aude.billard@epfl.ch) Teaching Assistants: Guillaume de Chambrier, Nadia Figueroa, Denys Lamotte, Nicola Sommer 2 2 Course Format Alternate between: Lectures
1 1 Introduction Lecturer: Prof. Aude Billard (aude.billard@epfl.ch) Teaching Assistants: Guillaume de Chambrier, Nadia Figueroa, Denys Lamotte, Nicola Sommer 2 2 Course Format Alternate between: Lectures
Learning Motion Categories using both Semantic and Structural Information
 Learning Motion Categories using both Semantic and Structural Information Shu-Fai Wong, Tae-Kyun Kim and Roberto Cipolla Department of Engineering, University of Cambridge, Cambridge, CB2 1PZ, UK {sfw26,
Learning Motion Categories using both Semantic and Structural Information Shu-Fai Wong, Tae-Kyun Kim and Roberto Cipolla Department of Engineering, University of Cambridge, Cambridge, CB2 1PZ, UK {sfw26,
Interactive Video Segmentation based on Quasi-Flat Zones
 Interactive Video Segmentation based on Quasi-Flat Zones Jonathan Weber University of Strasbourg LSIIT Pôle API - Bd Sébastien Brant 67412 Illkirch CEDEX FRANCE Email: j.weber@unistra.fr Sébastien Lefèvre
Interactive Video Segmentation based on Quasi-Flat Zones Jonathan Weber University of Strasbourg LSIIT Pôle API - Bd Sébastien Brant 67412 Illkirch CEDEX FRANCE Email: j.weber@unistra.fr Sébastien Lefèvre
Accurate fully automatic femur segmentation in pelvic radiographs using regression voting
 Accurate fully automatic femur segmentation in pelvic radiographs using regression voting C. Lindner 1, S. Thiagarajah 2, J.M. Wilkinson 2, arcogen Consortium, G.A. Wallis 3, and T.F. Cootes 1 1 Imaging
Accurate fully automatic femur segmentation in pelvic radiographs using regression voting C. Lindner 1, S. Thiagarajah 2, J.M. Wilkinson 2, arcogen Consortium, G.A. Wallis 3, and T.F. Cootes 1 1 Imaging
Learning Detectors from Large Datasets for Object Retrieval in Video Surveillance
 2012 IEEE International Conference on Multimedia and Expo Learning Detectors from Large Datasets for Object Retrieval in Video Surveillance Rogerio Feris, Sharath Pankanti IBM T. J. Watson Research Center
2012 IEEE International Conference on Multimedia and Expo Learning Detectors from Large Datasets for Object Retrieval in Video Surveillance Rogerio Feris, Sharath Pankanti IBM T. J. Watson Research Center
Outline. Multitemporal high-resolution image classification
 IGARSS-2011 Vancouver, Canada, July 24-29, 29, 2011 Multitemporal Region-Based Classification of High-Resolution Images by Markov Random Fields and Multiscale Segmentation Gabriele Moser Sebastiano B.
IGARSS-2011 Vancouver, Canada, July 24-29, 29, 2011 Multitemporal Region-Based Classification of High-Resolution Images by Markov Random Fields and Multiscale Segmentation Gabriele Moser Sebastiano B.
Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches
 Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches PhD Thesis by Payam Birjandi Director: Prof. Mihai Datcu Problematic
Modelling, Extraction and Description of Intrinsic Cues of High Resolution Satellite Images: Independent Component Analysis based approaches PhD Thesis by Payam Birjandi Director: Prof. Mihai Datcu Problematic
 Tracking Moving Objects In Video Sequences Yiwei Wang, Robert E. Van Dyck, and John F. Doherty Department of Electrical Engineering The Pennsylvania State University University Park, PA16802 Abstract{Object
Tracking Moving Objects In Video Sequences Yiwei Wang, Robert E. Van Dyck, and John F. Doherty Department of Electrical Engineering The Pennsylvania State University University Park, PA16802 Abstract{Object
A Robust Multiple Object Tracking for Sport Applications 1) Thomas Mauthner, Horst Bischof
 Thomas Mauthner, Horst Bischof") A Robust Multiple Object Tracking for Sport Applications 1) Thomas Mauthner, Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {mauthner,bischof}@icg.tu-graz.ac.at
A Robust Multiple Object Tracking for Sport Applications 1) Thomas Mauthner, Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology, Austria {mauthner,bischof}@icg.tu-graz.ac.at
 Fast and Robust Moving Object Segmentation Technique for MPEG-4 Object-based Coding and Functionality Ju Guo, Jongwon Kim and C.-C. Jay Kuo Integrated Media Systems Center and Department of Electrical
Fast and Robust Moving Object Segmentation Technique for MPEG-4 Object-based Coding and Functionality Ju Guo, Jongwon Kim and C.-C. Jay Kuo Integrated Media Systems Center and Department of Electrical
Simple and efficient online algorithms for real world applications
 Simple and efficient online algorithms for real world applications Università degli Studi di Milano Milano, Italy Talk @ Centro de Visión por Computador Something about me PhD in Robotics at LIRA-Lab,
Simple and efficient online algorithms for real world applications Università degli Studi di Milano Milano, Italy Talk @ Centro de Visión por Computador Something about me PhD in Robotics at LIRA-Lab,
How To Analyze Ball Blur On A Ball Image
 Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
Single Image 3D Reconstruction of Ball Motion and Spin From Motion Blur An Experiment in Motion from Blur Giacomo Boracchi, Vincenzo Caglioti, Alessandro Giusti Objective From a single image, reconstruct:
Open-Set Face Recognition-based Visitor Interface System
 Open-Set Face Recognition-based Visitor Interface System Hazım K. Ekenel, Lorant Szasz-Toth, and Rainer Stiefelhagen Computer Science Department, Universität Karlsruhe (TH) Am Fasanengarten 5, Karlsruhe
Open-Set Face Recognition-based Visitor Interface System Hazım K. Ekenel, Lorant Szasz-Toth, and Rainer Stiefelhagen Computer Science Department, Universität Karlsruhe (TH) Am Fasanengarten 5, Karlsruhe
Data Mining. Cluster Analysis: Advanced Concepts and Algorithms
 Data Mining Cluster Analysis: Advanced Concepts and Algorithms Tan,Steinbach, Kumar Introduction to Data Mining 4/18/2004 1 More Clustering Methods Prototype-based clustering Density-based clustering Graph-based
Data Mining Cluster Analysis: Advanced Concepts and Algorithms Tan,Steinbach, Kumar Introduction to Data Mining 4/18/2004 1 More Clustering Methods Prototype-based clustering Density-based clustering Graph-based
Building an Advanced Invariant Real-Time Human Tracking System
 UDC 004.41 Building an Advanced Invariant Real-Time Human Tracking System Fayez Idris 1, Mazen Abu_Zaher 2, Rashad J. Rasras 3, and Ibrahiem M. M. El Emary 4 1 School of Informatics and Computing, German-Jordanian
UDC 004.41 Building an Advanced Invariant Real-Time Human Tracking System Fayez Idris 1, Mazen Abu_Zaher 2, Rashad J. Rasras 3, and Ibrahiem M. M. El Emary 4 1 School of Informatics and Computing, German-Jordanian
Interactive person re-identification in TV series
 Interactive person re-identification in TV series Mika Fischer Hazım Kemal Ekenel Rainer Stiefelhagen CV:HCI lab, Karlsruhe Institute of Technology Adenauerring 2, 76131 Karlsruhe, Germany E-mail: {mika.fischer,ekenel,rainer.stiefelhagen}@kit.edu
Interactive person re-identification in TV series Mika Fischer Hazım Kemal Ekenel Rainer Stiefelhagen CV:HCI lab, Karlsruhe Institute of Technology Adenauerring 2, 76131 Karlsruhe, Germany E-mail: {mika.fischer,ekenel,rainer.stiefelhagen}@kit.edu
Machine Learning: Overview
 Machine Learning: Overview Why Learning? Learning is a core of property of being intelligent. Hence Machine learning is a core subarea of Artificial Intelligence. There is a need for programs to behave
Machine Learning: Overview Why Learning? Learning is a core of property of being intelligent. Hence Machine learning is a core subarea of Artificial Intelligence. There is a need for programs to behave
Journal of Industrial Engineering Research. Adaptive sequence of Key Pose Detection for Human Action Recognition
 IWNEST PUBLISHER Journal of Industrial Engineering Research (ISSN: 2077-4559) Journal home page: http://www.iwnest.com/aace/ Adaptive sequence of Key Pose Detection for Human Action Recognition 1 T. Sindhu
IWNEST PUBLISHER Journal of Industrial Engineering Research (ISSN: 2077-4559) Journal home page: http://www.iwnest.com/aace/ Adaptive sequence of Key Pose Detection for Human Action Recognition 1 T. Sindhu
Cloud tracking with optical flow for short-term solar forecasting
 Cloud tracking with optical flow for short-term solar forecasting Philip Wood-Bradley, José Zapata, John Pye Solar Thermal Group, Australian National University, Canberra, Australia Corresponding author:
Cloud tracking with optical flow for short-term solar forecasting Philip Wood-Bradley, José Zapata, John Pye Solar Thermal Group, Australian National University, Canberra, Australia Corresponding author:
Low-resolution Character Recognition by Video-based Super-resolution
 2009 10th International Conference on Document Analysis and Recognition Low-resolution Character Recognition by Video-based Super-resolution Ataru Ohkura 1, Daisuke Deguchi 1, Tomokazu Takahashi 2, Ichiro
2009 10th International Conference on Document Analysis and Recognition Low-resolution Character Recognition by Video-based Super-resolution Ataru Ohkura 1, Daisuke Deguchi 1, Tomokazu Takahashi 2, Ichiro
Morphological analysis on structural MRI for the early diagnosis of neurodegenerative diseases. Marco Aiello On behalf of MAGIC-5 collaboration
 Morphological analysis on structural MRI for the early diagnosis of neurodegenerative diseases Marco Aiello On behalf of MAGIC-5 collaboration Index Motivations of morphological analysis Segmentation of
Morphological analysis on structural MRI for the early diagnosis of neurodegenerative diseases Marco Aiello On behalf of MAGIC-5 collaboration Index Motivations of morphological analysis Segmentation of
A Real Time Hand Tracking System for Interactive Applications
 A Real Time Hand Tracking System for Interactive Applications Siddharth Swarup Rautaray Indian Institute of Information Technology Allahabad ABSTRACT In vision based hand tracking systems color plays an
A Real Time Hand Tracking System for Interactive Applications Siddharth Swarup Rautaray Indian Institute of Information Technology Allahabad ABSTRACT In vision based hand tracking systems color plays an
Human Pose Estimation from RGB Input Using Synthetic Training Data
 Human Pose Estimation from RGB Input Using Synthetic Training Data Oscar Danielsson and Omid Aghazadeh School of Computer Science and Communication KTH, Stockholm, Sweden {osda02, omida}@kth.se arxiv:1405.1213v2
Human Pose Estimation from RGB Input Using Synthetic Training Data Oscar Danielsson and Omid Aghazadeh School of Computer Science and Communication KTH, Stockholm, Sweden {osda02, omida}@kth.se arxiv:1405.1213v2
Distributed forests for MapReduce-based machine learning
 Distributed forests for MapReduce-based machine learning Ryoji Wakayama, Ryuei Murata, Akisato Kimura, Takayoshi Yamashita, Yuji Yamauchi, Hironobu Fujiyoshi Chubu University, Japan. NTT Communication
Distributed forests for MapReduce-based machine learning Ryoji Wakayama, Ryuei Murata, Akisato Kimura, Takayoshi Yamashita, Yuji Yamauchi, Hironobu Fujiyoshi Chubu University, Japan. NTT Communication
VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS
 VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS Aswin C Sankaranayanan, Qinfen Zheng, Rama Chellappa University of Maryland College Park, MD - 277 {aswch, qinfen, rama}@cfar.umd.edu Volkan Cevher, James
VEHICLE TRACKING USING ACOUSTIC AND VIDEO SENSORS Aswin C Sankaranayanan, Qinfen Zheng, Rama Chellappa University of Maryland College Park, MD - 277 {aswch, qinfen, rama}@cfar.umd.edu Volkan Cevher, James
3 Image-Based Photo Hulls. 2 Image-Based Visual Hulls. 3.1 Approach. 3.2 Photo-Consistency. Figure 1. View-dependent geometry.
 Image-Based Photo Hulls Greg Slabaugh, Ron Schafer Georgia Institute of Technology Center for Signal and Image Processing Atlanta, GA 30332 {slabaugh, rws}@ece.gatech.edu Mat Hans Hewlett-Packard Laboratories
Image-Based Photo Hulls Greg Slabaugh, Ron Schafer Georgia Institute of Technology Center for Signal and Image Processing Atlanta, GA 30332 {slabaugh, rws}@ece.gatech.edu Mat Hans Hewlett-Packard Laboratories
LABELING IN VIDEO DATABASES. School of Electrical and Computer Engineering. 1285 Electrical Engineering Building. in the video database.
 FACE DETECTION FOR PSEUDO-SEMANTIC LABELING IN VIDEO DATABASES Alberto Albiol Departamento de Comunicaciones Universidad Politçecnica de Valencia Valencia, Spain email: alalbiol@dcom.upv.es Charles A.
FACE DETECTION FOR PSEUDO-SEMANTIC LABELING IN VIDEO DATABASES Alberto Albiol Departamento de Comunicaciones Universidad Politçecnica de Valencia Valencia, Spain email: alalbiol@dcom.upv.es Charles A.
Interactive Multiscale Classification of. High-Resolution Remote Sensing Images
 Interactive Multiscale Classification of 1 High-Resolution Remote Sensing Images Jefersson Alex dos Santos, Philippe-Henri Gosselin, Sylvie Philipp-Foliguet, Ricardo da S. Torres and Alexandre Xavier Falcão
Interactive Multiscale Classification of 1 High-Resolution Remote Sensing Images Jefersson Alex dos Santos, Philippe-Henri Gosselin, Sylvie Philipp-Foliguet, Ricardo da S. Torres and Alexandre Xavier Falcão
Multi-view Intelligent Vehicle Surveillance System
 Multi-view Intelligent Vehicle Surveillance System S. Denman, C. Fookes, J. Cook, C. Davoren, A. Mamic, G. Farquharson, D. Chen, B. Chen and S. Sridharan Image and Video Research Laboratory Queensland
Multi-view Intelligent Vehicle Surveillance System S. Denman, C. Fookes, J. Cook, C. Davoren, A. Mamic, G. Farquharson, D. Chen, B. Chen and S. Sridharan Image and Video Research Laboratory Queensland
Classifying Manipulation Primitives from Visual Data
 Classifying Manipulation Primitives from Visual Data Sandy Huang and Dylan Hadfield-Menell Abstract One approach to learning from demonstrations in robotics is to make use of a classifier to predict if
Classifying Manipulation Primitives from Visual Data Sandy Huang and Dylan Hadfield-Menell Abstract One approach to learning from demonstrations in robotics is to make use of a classifier to predict if
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER
 ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
ROBUST VEHICLE TRACKING IN VIDEO IMAGES BEING TAKEN FROM A HELICOPTER Fatemeh Karimi Nejadasl, Ben G.H. Gorte, and Serge P. Hoogendoorn Institute of Earth Observation and Space System, Delft University
AUTOMATIC CROWD ANALYSIS FROM VERY HIGH RESOLUTION SATELLITE IMAGES
 In: Stilla U et al (Eds) PIA11. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 38 (3/W22) AUTOMATIC CROWD ANALYSIS FROM VERY HIGH RESOLUTION SATELLITE IMAGES
In: Stilla U et al (Eds) PIA11. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences 38 (3/W22) AUTOMATIC CROWD ANALYSIS FROM VERY HIGH RESOLUTION SATELLITE IMAGES
Image Segmentation and Registration
 Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Image Segmentation and Registration Dr. Christine Tanner (tanner@vision.ee.ethz.ch) Computer Vision Laboratory, ETH Zürich Dr. Verena Kaynig, Machine Learning Laboratory, ETH Zürich Outline Segmentation
Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling
 , March 13-15, 2013, Hong Kong Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling Naveed Ahmed Abstract We present a system for spatio-temporally
, March 13-15, 2013, Hong Kong Spatio-Temporally Coherent 3D Animation Reconstruction from Multi-view RGB-D Images using Landmark Sampling Naveed Ahmed Abstract We present a system for spatio-temporally
Fast Semantic Segmentation of 3D Point Clouds using a Dense CRF with Learned Parameters
 Fast Semantic Segmentation of 3D Point Clouds using a Dense CRF with Learned Parameters Daniel Wolf, Johann Prankl and Markus Vincze Abstract In this paper, we present an efficient semantic segmentation
Fast Semantic Segmentation of 3D Point Clouds using a Dense CRF with Learned Parameters Daniel Wolf, Johann Prankl and Markus Vincze Abstract In this paper, we present an efficient semantic segmentation
Semi-Supervised Learning in Inferring Mobile Device Locations
 Semi-Supervised Learning in Inferring Mobile Device Locations Rong Duan, Olivia Hong, Guangqin Ma rduan,ohong,gma @research.att.com AT&T Labs 200 S Laurel Ave Middletown, NJ 07748 Abstract With the development
Semi-Supervised Learning in Inferring Mobile Device Locations Rong Duan, Olivia Hong, Guangqin Ma rduan,ohong,gma @research.att.com AT&T Labs 200 S Laurel Ave Middletown, NJ 07748 Abstract With the development
Neovision2 Performance Evaluation Protocol
 Neovision2 Performance Evaluation Protocol Version 3.0 4/16/2012 Public Release Prepared by Rajmadhan Ekambaram rajmadhan@mail.usf.edu Dmitry Goldgof, Ph.D. goldgof@cse.usf.edu Rangachar Kasturi, Ph.D.
Neovision2 Performance Evaluation Protocol Version 3.0 4/16/2012 Public Release Prepared by Rajmadhan Ekambaram rajmadhan@mail.usf.edu Dmitry Goldgof, Ph.D. goldgof@cse.usf.edu Rangachar Kasturi, Ph.D.
Reconstructing 3D Pose and Motion from a Single Camera View
 Reconstructing 3D Pose and Motion from a Single Camera View R Bowden, T A Mitchell and M Sarhadi Brunel University, Uxbridge Middlesex UB8 3PH richard.bowden@brunel.ac.uk Abstract This paper presents a
Reconstructing 3D Pose and Motion from a Single Camera View R Bowden, T A Mitchell and M Sarhadi Brunel University, Uxbridge Middlesex UB8 3PH richard.bowden@brunel.ac.uk Abstract This paper presents a
Evaluation of an online learning approach for robust object tracking
 REPORT Evaluation of an online learning approach for robust object tracking Georg Nebehay Branislav Micusik Cristina Picus Roman Pflugfelder 01.03.2011 AIT-DSS-0279 VERSIONSNUMMER Evaluation of an online
REPORT Evaluation of an online learning approach for robust object tracking Georg Nebehay Branislav Micusik Cristina Picus Roman Pflugfelder 01.03.2011 AIT-DSS-0279 VERSIONSNUMMER Evaluation of an online
Pictorial Structures Revisited: People Detection and Articulated Pose Estimation
 Pictorial Structures Revisited: People Detection and Articulated Pose Estimation Mykhaylo Andriluka, Stefan Roth, and Bernt Schiele Department of Computer Science, TU Darmstadt Abstract Non-rigid object
Pictorial Structures Revisited: People Detection and Articulated Pose Estimation Mykhaylo Andriluka, Stefan Roth, and Bernt Schiele Department of Computer Science, TU Darmstadt Abstract Non-rigid object
Data a systematic approach
 Pattern Discovery on Australian Medical Claims Data a systematic approach Ah Chung Tsoi Senior Member, IEEE, Shu Zhang, Markus Hagenbuchner Member, IEEE Abstract The national health insurance system in
Pattern Discovery on Australian Medical Claims Data a systematic approach Ah Chung Tsoi Senior Member, IEEE, Shu Zhang, Markus Hagenbuchner Member, IEEE Abstract The national health insurance system in
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite
 Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite Philip Lenz 1 Andreas Geiger 2 Christoph Stiller 1 Raquel Urtasun 3 1 KARLSRUHE INSTITUTE OF TECHNOLOGY 2 MAX-PLANCK-INSTITUTE IS 3
Live Feature Clustering in Video Using Appearance and 3D Geometry
 ANGELI, DAVISON: LIVE FEATURE CLUSTERING IN VIDEO 1 Live Feature Clustering in Video Using Appearance and 3D Geometry Adrien Angeli a.angeli@imperial.ac.uk Andrew Davison ajd@doc.ic.ac.uk Department of
ANGELI, DAVISON: LIVE FEATURE CLUSTERING IN VIDEO 1 Live Feature Clustering in Video Using Appearance and 3D Geometry Adrien Angeli a.angeli@imperial.ac.uk Andrew Davison ajd@doc.ic.ac.uk Department of
Steven C.H. Hoi. School of Computer Engineering Nanyang Technological University Singapore
 Steven C.H. Hoi School of Computer Engineering Nanyang Technological University Singapore Acknowledgments: Peilin Zhao, Jialei Wang, Hao Xia, Jing Lu, Rong Jin, Pengcheng Wu, Dayong Wang, etc. 2 Agenda
Steven C.H. Hoi School of Computer Engineering Nanyang Technological University Singapore Acknowledgments: Peilin Zhao, Jialei Wang, Hao Xia, Jing Lu, Rong Jin, Pengcheng Wu, Dayong Wang, etc. 2 Agenda
An Automatic and Accurate Segmentation for High Resolution Satellite Image S.Saumya 1, D.V.Jiji Thanka Ligoshia 2
 An Automatic and Accurate Segmentation for High Resolution Satellite Image S.Saumya 1, D.V.Jiji Thanka Ligoshia 2 Assistant Professor, Dept of ECE, Bethlahem Institute of Engineering, Karungal, Tamilnadu,
An Automatic and Accurate Segmentation for High Resolution Satellite Image S.Saumya 1, D.V.Jiji Thanka Ligoshia 2 Assistant Professor, Dept of ECE, Bethlahem Institute of Engineering, Karungal, Tamilnadu,
CS231M Project Report - Automated Real-Time Face Tracking and Blending
 CS231M Project Report - Automated Real-Time Face Tracking and Blending Steven Lee, slee2010@stanford.edu June 6, 2015 1 Introduction Summary statement: The goal of this project is to create an Android
CS231M Project Report - Automated Real-Time Face Tracking and Blending Steven Lee, slee2010@stanford.edu June 6, 2015 1 Introduction Summary statement: The goal of this project is to create an Android
Tracking of Small Unmanned Aerial Vehicles
 Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: spk170@stanford.edu Aeronautics and Astronautics Stanford
Tracking of Small Unmanned Aerial Vehicles Steven Krukowski Adrien Perkins Aeronautics and Astronautics Stanford University Stanford, CA 94305 Email: spk170@stanford.edu Aeronautics and Astronautics Stanford
Document Image Retrieval using Signatures as Queries
 Document Image Retrieval using Signatures as Queries Sargur N. Srihari, Shravya Shetty, Siyuan Chen, Harish Srinivasan, Chen Huang CEDAR, University at Buffalo(SUNY) Amherst, New York 14228 Gady Agam and
Document Image Retrieval using Signatures as Queries Sargur N. Srihari, Shravya Shetty, Siyuan Chen, Harish Srinivasan, Chen Huang CEDAR, University at Buffalo(SUNY) Amherst, New York 14228 Gady Agam and
UNSUPERVISED COSEGMENTATION BASED ON SUPERPIXEL MATCHING AND FASTGRABCUT. Hongkai Yu and Xiaojun Qi
 UNSUPERVISED COSEGMENTATION BASED ON SUPERPIXEL MATCHING AND FASTGRABCUT Hongkai Yu and Xiaojun Qi Department of Computer Science, Utah State University, Logan, UT 84322-4205 hongkai.yu@aggiemail.usu.edu
UNSUPERVISED COSEGMENTATION BASED ON SUPERPIXEL MATCHING AND FASTGRABCUT Hongkai Yu and Xiaojun Qi Department of Computer Science, Utah State University, Logan, UT 84322-4205 hongkai.yu@aggiemail.usu.edu
PDF hosted at the Radboud Repository of the Radboud University Nijmegen
 PDF hosted at the Radboud Repository of the Radboud University Nijmegen The following full text is a publisher's version. For additional information about this publication click this link. http://hdl.handle.net/2066/54957
PDF hosted at the Radboud Repository of the Radboud University Nijmegen The following full text is a publisher's version. For additional information about this publication click this link. http://hdl.handle.net/2066/54957
Color Segmentation Based Depth Image Filtering
 Color Segmentation Based Depth Image Filtering Michael Schmeing and Xiaoyi Jiang Department of Computer Science, University of Münster Einsteinstraße 62, 48149 Münster, Germany, {m.schmeing xjiang}@uni-muenster.de
Color Segmentation Based Depth Image Filtering Michael Schmeing and Xiaoyi Jiang Department of Computer Science, University of Münster Einsteinstraße 62, 48149 Münster, Germany, {m.schmeing xjiang}@uni-muenster.de
Real-time Visual Tracker by Stream Processing
 Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
Real-time Visual Tracker by Stream Processing Simultaneous and Fast 3D Tracking of Multiple Faces in Video Sequences by Using a Particle Filter Oscar Mateo Lozano & Kuzahiro Otsuka presented by Piotr Rudol
EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM
 EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM Amol Ambardekar, Mircea Nicolescu, and George Bebis Department of Computer Science and Engineering University
EFFICIENT VEHICLE TRACKING AND CLASSIFICATION FOR AN AUTOMATED TRAFFIC SURVEILLANCE SYSTEM Amol Ambardekar, Mircea Nicolescu, and George Bebis Department of Computer Science and Engineering University
Tracking-Learning-Detection
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract This paper investigates
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract This paper investigates
Real-time Traffic Congestion Detection Based on Video Analysis
 Journal of Information & Computational Science 9: 10 (2012) 2907 2914 Available at http://www.joics.com Real-time Traffic Congestion Detection Based on Video Analysis Shan Hu a,, Jiansheng Wu a, Ling Xu
Journal of Information & Computational Science 9: 10 (2012) 2907 2914 Available at http://www.joics.com Real-time Traffic Congestion Detection Based on Video Analysis Shan Hu a,, Jiansheng Wu a, Ling Xu